\title {Philosophical Psychology \\ 11: The Motor Theory of Goal Tracking}
\maketitle

11: The Motor Theory of Goal Tracking
[email protected]
\def \ititle {11: The Motor Theory of Goal Tracking}
\begin{center}
{\Large
\textbf{\ititle}
}
\iemail %
\end{center}
\section{Pure Goal Tracking}
\section{Pure Goal Tracking}
An account of pure goal tracking is an account of how you could
in principle infer facts about the goals to which actions are directed from
facts about joint displacements, bodily configurations and their effects
(e.g. sounds).
Start with a case in which behaviour reading is clearly involved.
I take Byrne’s study
to demonstrate that chimps are capable of sophisticated behaviour reading.
But how might they represent behaviours?
The procedure for preparing a nettle to eat while avoiding contact with its stings is shown in
\vref{fig:byrne_2003_fig1}. It involves multiple steps. Some steps may be repeated varying numbers of
times, and not all steps occur in every case. The fact that gorillas can learn this and other
procedures for acquiring and preparing food by observing others’ behaviour suggests that they have
sophisticated behaviour reading abilities \citep[p.~513]{Byrne:2003wx}. If we understood the nature
of these behaviour reading abilities and their limits, we might be better able to understand their
abilities to track mental states too.
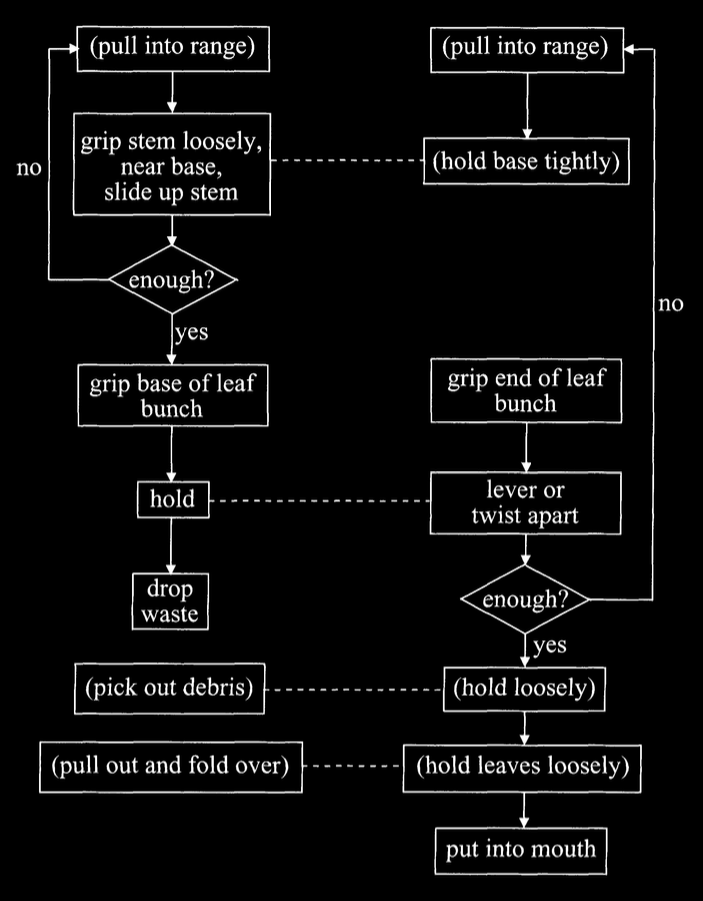
Byrne 2003, figure 1
‘great apes [are] able to acquire complex and elaborate local traditions of food
acquisition, some of them involving tool use’ \citep[p~513]{Byrne:2003wx}
So even quite sophisticated behaviour reading is possible without any
reliance on communication by language.
We can therefore think of behaviour reading as foundational for any kind
of radical interpretation.
[background]
‘Nettles, Laportea alatipes, are an important food of mountain gorillas in Rwanda (Watts 1984),
rich in protein and low in secondary compounds and structural carbohydrate (Waterman et al. 1983).
Unfortunately for the gorillas, this plant is 'defended' by powerful stinging hairs,
especially dense on the stem, petioles and leaf-edges.
All gorillas in the local population process nettles in broadly the same way,
a technique that minimizes contact of sting- ing hairs with their hands and
lips (Byrne & Byrne 1991; figure 1). A series of small transformations is
made to plant material: stripping leaves off stems, accumulating
larger bundles of leaves, detachment of petioles, picking out unwanted debris,
and finally folding a package of leaf blades within a single leaf before
ingestion. The means by which each small change is made are idiosyncratic and
variable with context (Byrne & Byrne 1993), thus presum- ably best learned
by individual experience. However, the overall sequence of five discrete
stages in the process is standardized and appears to be essential for efficiency
(Byrne et al. 2001a).’ \citep[pp.~531--2]{Byrne:2003wx}
‘Like other complex feeding tasks in great apes, preparing nettles is a hierarchically
organized skill, showing considerable flexibility: stages that are occasionally
unnecessary are omitted, and sections of the process (of one or several ordered stages)
are often repeated iteratively to a criterion apparently based on an adequate size of
food bundle (Byrne & Russon 1998).’ \citep[pp.~532]{Byrne:2003wx}

The Teleological Stance
\section{The Teleological Stance}
\section{The Teleological Stance}
The Teleological Stance (Gergeley and Csibra , 1995) provides a computational
theory of pure goal ascription.
Pure goal ascription is the process of identifying goals to which anothers’
actions are directed independently of any knowledge, or beliefs about,
the intentions or other mental states of an agent.
In the lecture on behaviour reading last week, I offered a brief survey
of mechanisms that could be involved in getting from joint displacements and
bodily configurations to larger, more abstract bits of behaviour grouped into
units in ways that reflect structures of action.

The Motor Theory of Goal Tracking
\section{The Motor Theory of Goal Tracking}
\section{The Motor Theory of Goal Tracking}
How do humans track the goals of others’ actions?
According to the Motor Theory of Goal Tracking, it is sometimes* by
means of motor processes.
More carefully, the Motor Theory of Goal Tracking consists of these claims:
(1) in action observation, possible outcomes of observed actions are represented motorically;
(2) these representations trigger motor processes much as if the observer were performing actions
directed to the outcomes;
(3) such processes generates predictions;
(4) a triggering representation is weakened if the predictions it generates fail.
The result is that, often enough, the only only outcomes to which the observed action is a means
are represented strongly.
(*‘sometimes’ because the Motor Theory is part of a dual-process account of goal-tracking.)
\emph{The Motor Theory of Goal Tracking}
Infants’ pure goal-tracking depends on the double life of motor processes.
According to the \emph{Motor Theory of Goal Tracking}, infants (and adults) sometimes track the
goals of others’ by means of motor processes \citep[see][for details]{sinigaglia:2015_puzzle}.
More carefully the \emph{Motor Theory of Goal Tracking} states that:
\begin{enumerate}
\item in action observation, possible outcomes of observed actions are represented motorically;
\item these representations trigger motor processes much as if the observer were performing actions directed to the outcomes;
\item such processes generates predictions;
\item a triggering representation is weakened if the predictions it generates fail.
\end{enumerate}
The result is that, often enough, the only only outcomes to which the observed action is a means
are represented strongly.
The Simple View
Outcomes such as reaching for and grasping of a cup can be represented motorically.
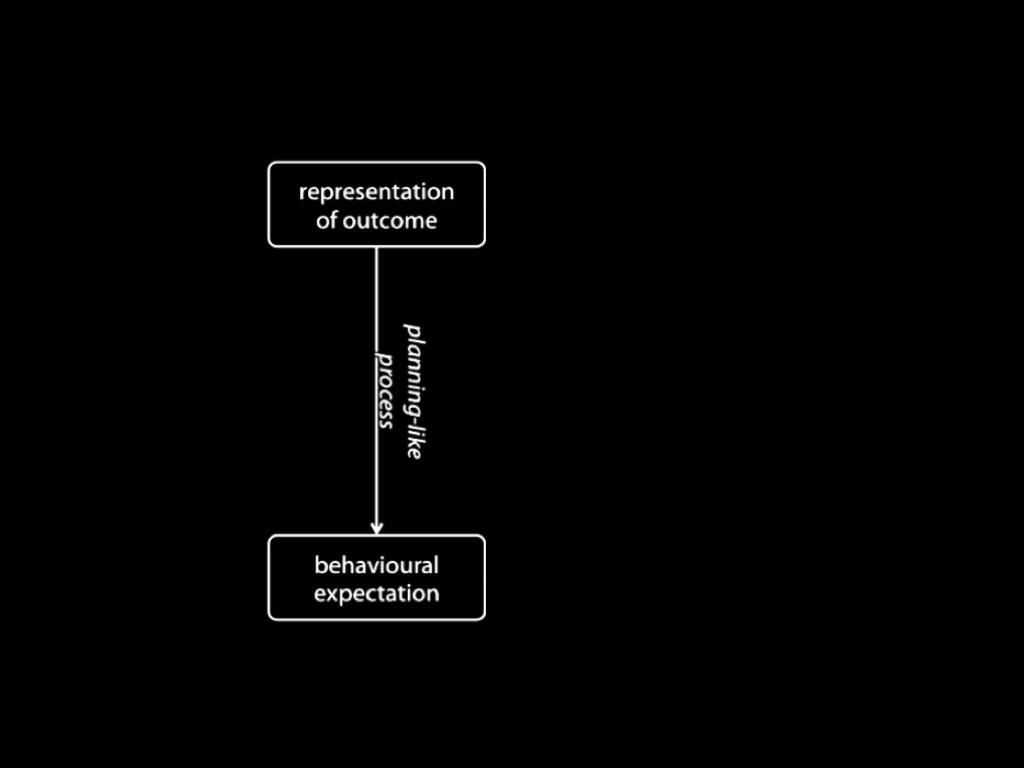
As a body of research on mirror neurons and motor simulation more generally demonstrates,
motor representations of outcomes can generate expectations concerning another agent’s behaviour
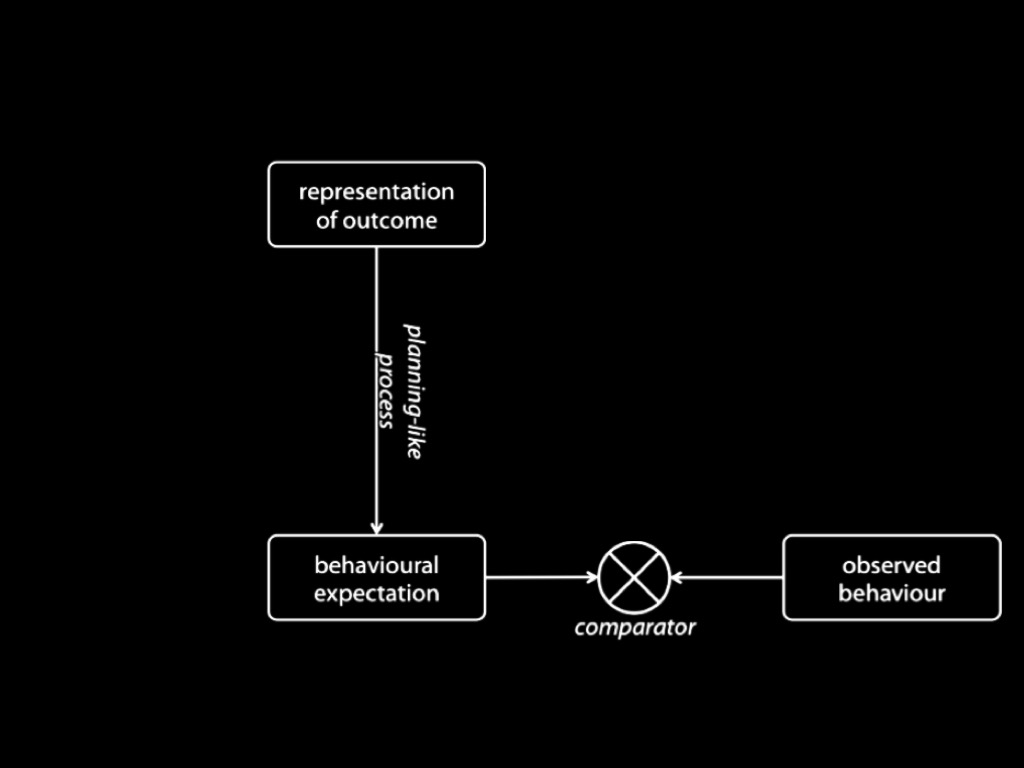
These expectations are plausibly compared with the behavior that is actually observed.
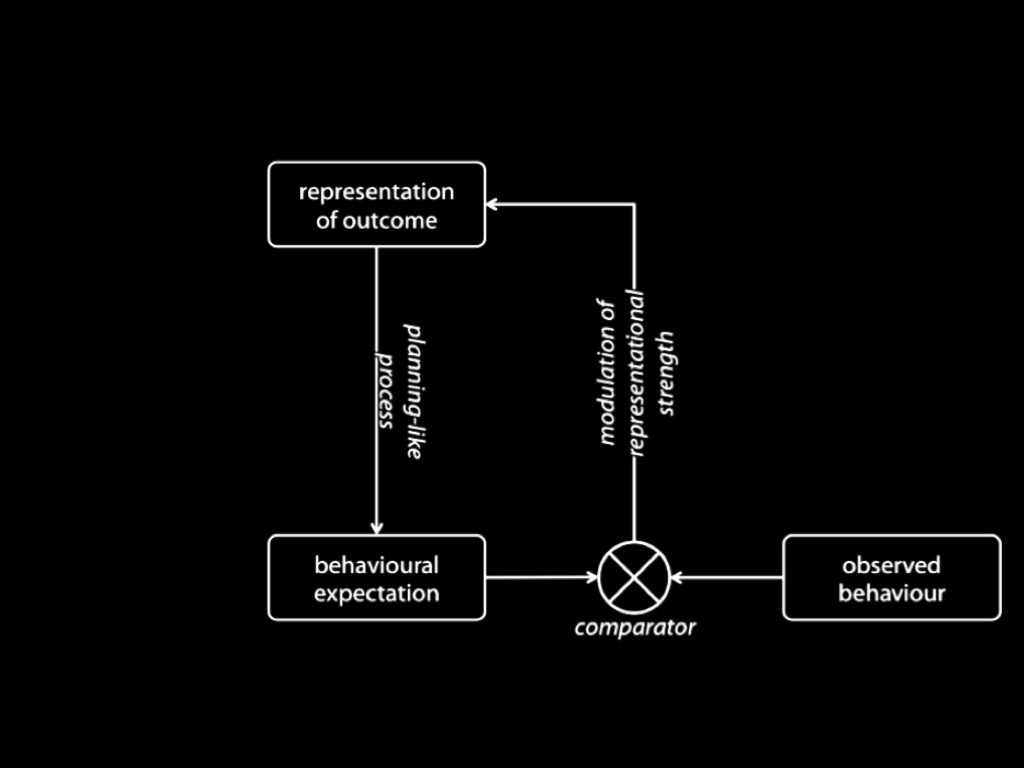
And we conjecture that the result of this comparison modulates the strength of the motor representation of the outcome.
Within limits, this modulation will ensures that an outcome represented motorically is likely to be a goal of the observed action.
In this way, motor representations enable goal tracking.
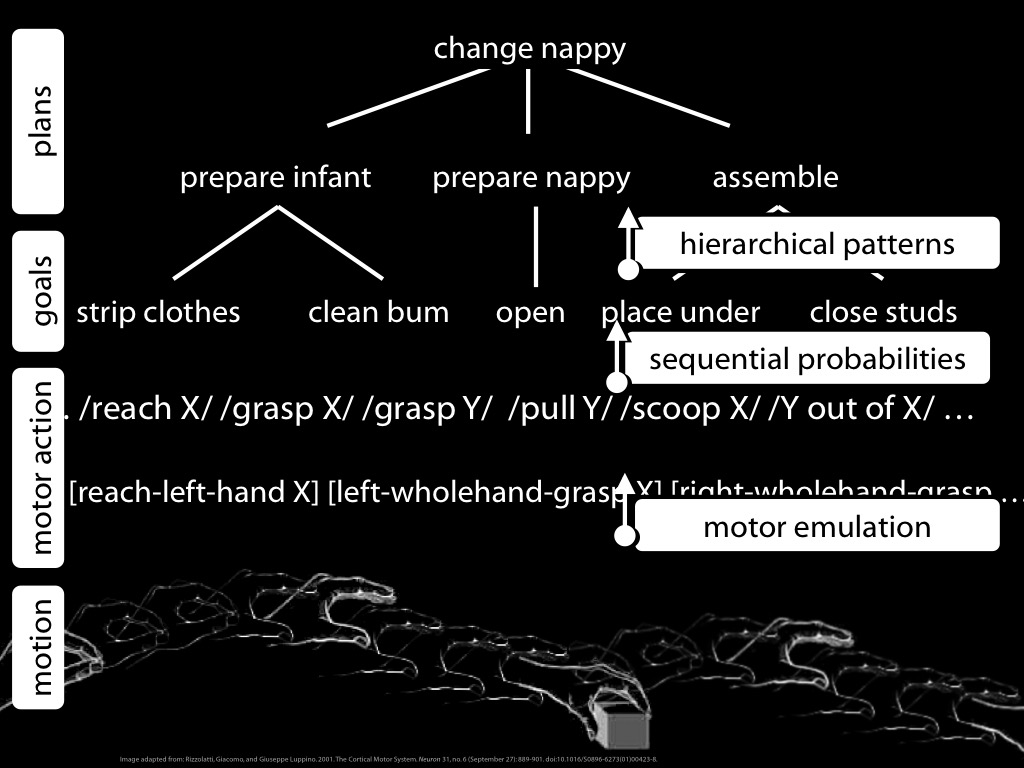
Sinigalia & Butterfill 2015, figure 1
Goal-tracking is acting in reverse.
-- in action observation, possible outcomes of observed actions are represented
-- these representations trigger planning as if performing actions directed to the outcomes
-- such planning generates predictions
-- a triggering representation is weakened if its predictions fail
The result is that the only only outcomes to which the observed action is a means
are represented strongly.
There is evidence that a motor representation of an outcome can cause a determination of which
movements are likely to be performed to achieve that outcome \citep[see, for
instance,][]{kilner:2004_motor, urgesi:2010_simulating}. Further, the processes involved in
determining how observed actions are likely to unfold given their outcomes are closely related,
or identical, to processes involved in performing actions.
This is known in part thanks to studies of how observing actions can facilitate performing
actions congruent with those observed, and can interfere with performing incongruent actions
\citep{
brass:2000_compatibility,
craighero:2002_hand,
kilner:2003_interference,
costantini:2012_does}.
Planning-like processes in action observation have also been demonstrated by measuring observers' predictive gaze. If you were to observe just the early phases of a grasping movement, your eyes might jump to its likely target, ignoring nearby objects \citep{ambrosini:2011_grasping}. These proactive eye movements resemble those you would typically make if you were acting yourself \citep{Flanagan:2003lm}.
Importantly, the occurrence of such proactive eye movements in action observation depends on your
representing the outcome of an action motorically; even temporary interference in the observer's
motor abilities will interfere with the eye movements \citep{Costantini:2012fk}.
These proactive eye movements also depend on planning-like processes; requiring the observer to
perform actions incongruent with those she is observing can eliminate proactive eye movements
\citep{Costantini:2012uq}. This, then, is further evidence for planning-like motor processes in
action observation.
So observers represent outcomes motorically and these representations trigger planning-like processes
which generate expectations about how the observed actions will unfold and their sensory consequences.
Now the mere occurrence of these processes is not sufficient to explain why, in action observation,
an outcome represented motorically is likely to be an outcome to which the observed action is
directed.
To take a tiny step further, we conjecture that, in action observation, \textbf{motor representations of
outcomes are weakened to the extent that the expectations they generate are unmet}
\citep[compare][]{Fogassi:2005nf}.
A motor representation of an outcome to which an observed action is not directed is likely to
generate incorrect expectations about how this action will unfold, and failures of these
expectations to be met will weaken the representation.
This is what ensures that there is a correspondence between outcomes represented motorically in
observing actions and the goals of those actions.
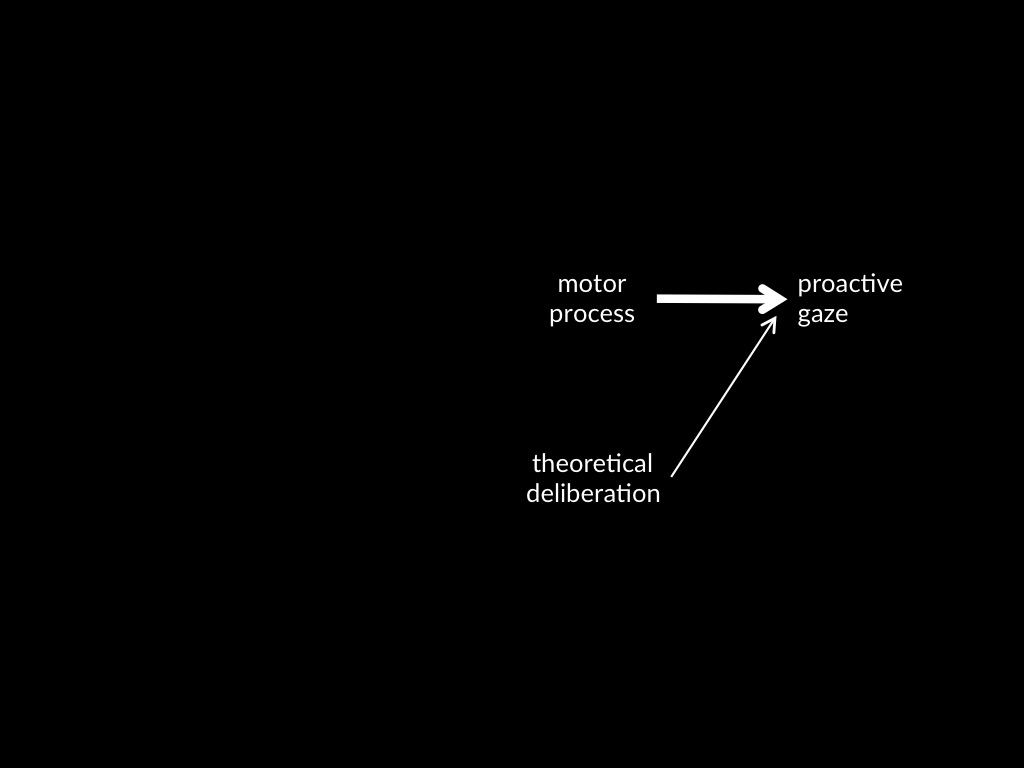
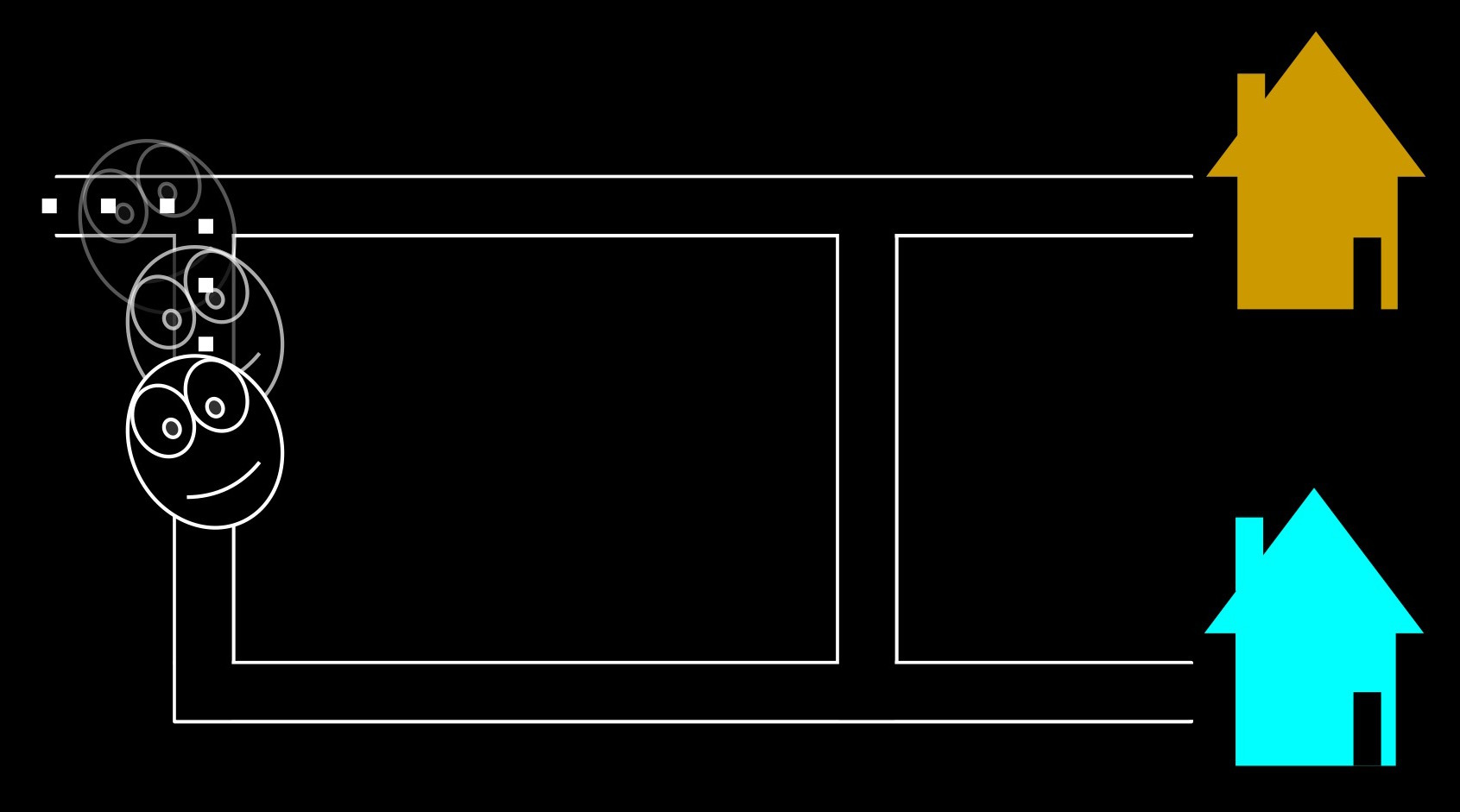
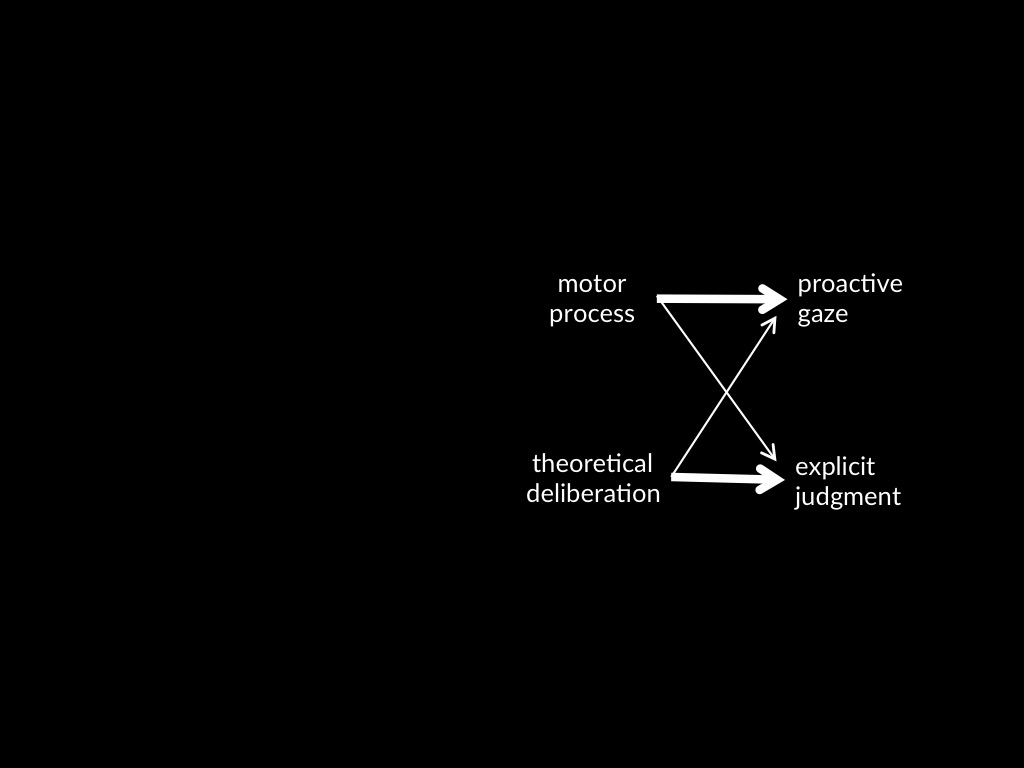
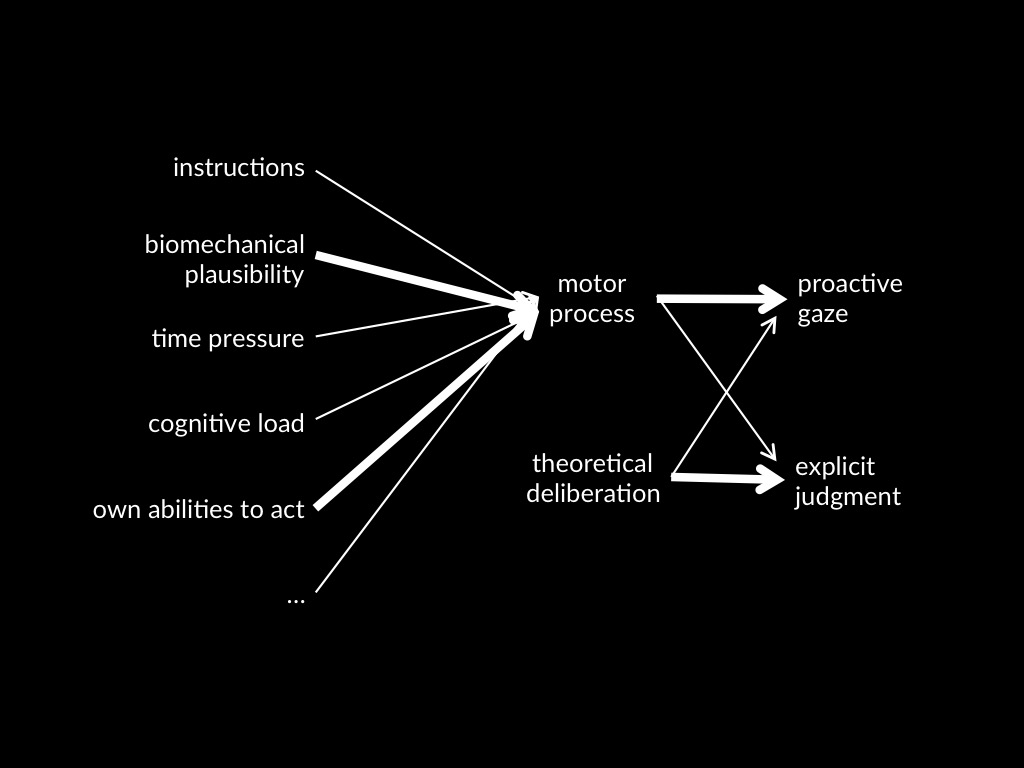
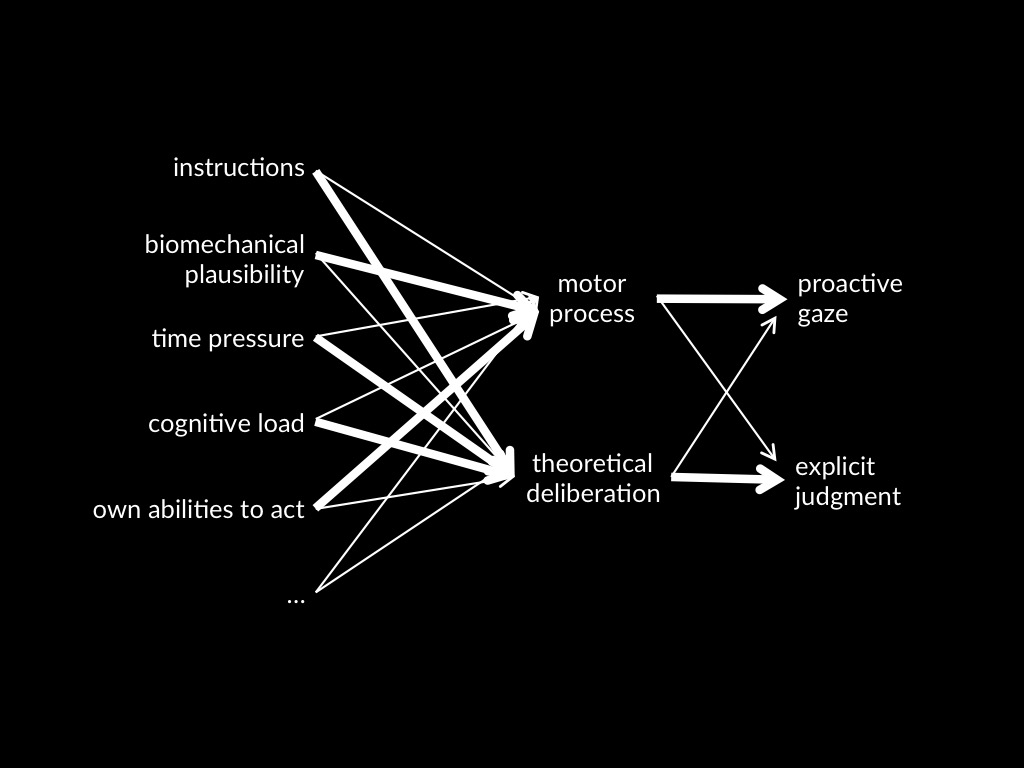
‘proactive gaze’ and ‘explicit judgement’ are variables whose values represent
whether there is a proactive gaze or explicit judgement, and what is it to or about.
Likewise, ‘motor process’ is a variable whose values represent ...
The lines depict how the variables are causally related. I’ve used thick and thin
lines informally, to indicate weaker and stronger influences.
The dual-process theory of goal-tracking makes perfect sense of development.
It says that what we observe in six- and nine-month-olds is motor-based goal-tracking.
Presumably the more flexible, reasoning-based goal-tracking processes emerge some time
later in development.

Marr’s Threefold Distinction
\section{Marr’s Threefold Distinction}
\section{Marr’s Threefold Distinction}
Marr helpfully distinguishes computational description (What is the thing for and how does it achieve this?)
from representations and algorithms (How are the inputs and outputs represented, and how is the transformation accomplished?)
and from the hardware implementation (How are the representations and algorithms physically realised?)

conclusion
In conclusion, ...