Click here and press the right key for the next slide (or swipe left)
also ...
Press the left key to go backwards (or swipe right)
Press n to toggle whether notes are shown (or add '?notes' to the url before the #)
Press m or double tap to slide thumbnails (menu)
Press ? at any time to show the keyboard shortcuts

13: Twin Interface Problems
\def \ititle {13: Twin Interface Problems}
\begin{center}
{\Large
\textbf{\ititle}
}
\iemail %
\end{center}
\section{An Interface Problem: Preferences}
‘we should search in vain among the literature for a consensus about the
psychological processes by which
primary motivational states,
such as hunger and thirst,
regulate simple goal-directed [i.e. instrumental] acts’
(Dickinson & Balleine, 1994 p. 1)
An interface problem ...
‘we should search in vain among the literature for a consensus about the psychological processes by which primary motivational states, such as hunger and thirst, regulate simple goal-directed [i.e. instrumental] acts’
\citep[p.~1]{dickinson:1994_motivational}
Dickinson & Balleine, 1994 p. 1
This is a very basic question.
Why do you go to the kitchen and press the lever to get some water
when you are thirsty?
An Interface Problem:
How are non-accidental matches possible?
Primary motivational states guide some actions.
Preferences guide some actions.
Pursuing a single goal can involve both kinds of state.
As in the case of lever pressing then magazine entry to get the sugar solution.
(Not demonstrated in this talk.)
Primary motivational states can differ from preferences.
Two motivational states match
in a particular context
just if, in that context,
the actions one would cause and the actions the other would cause
are not too different.

... an interface problem where there are two sets of preferences.
Here there’s conversation to sort them out
(although that doesn’t work so well)
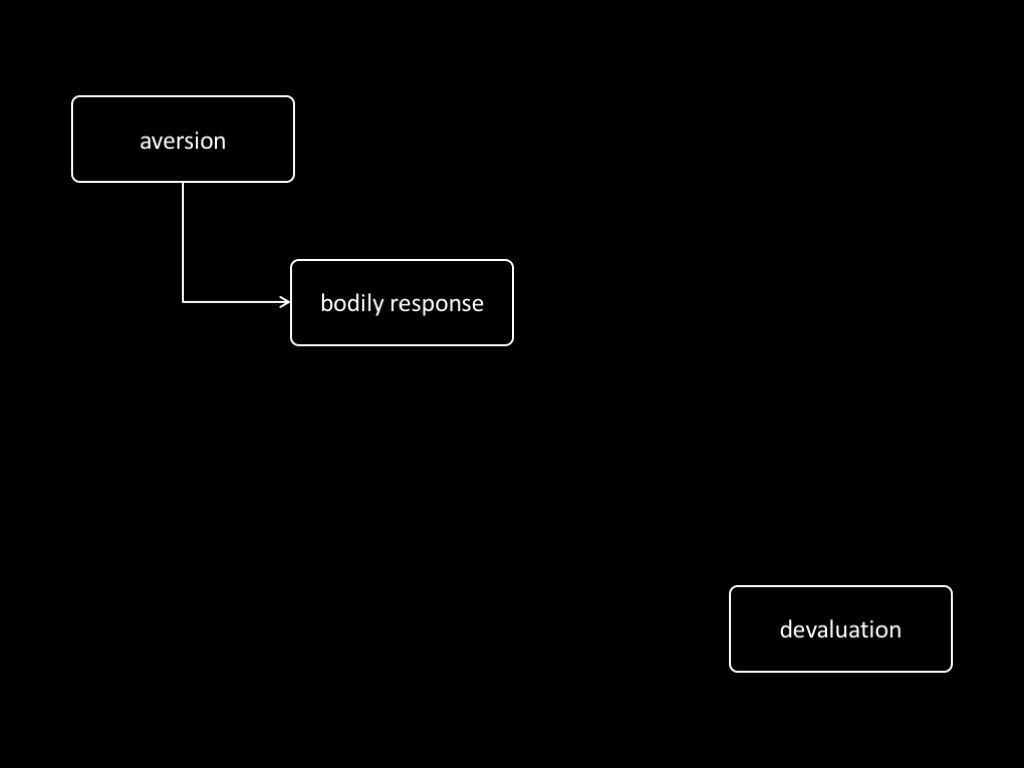
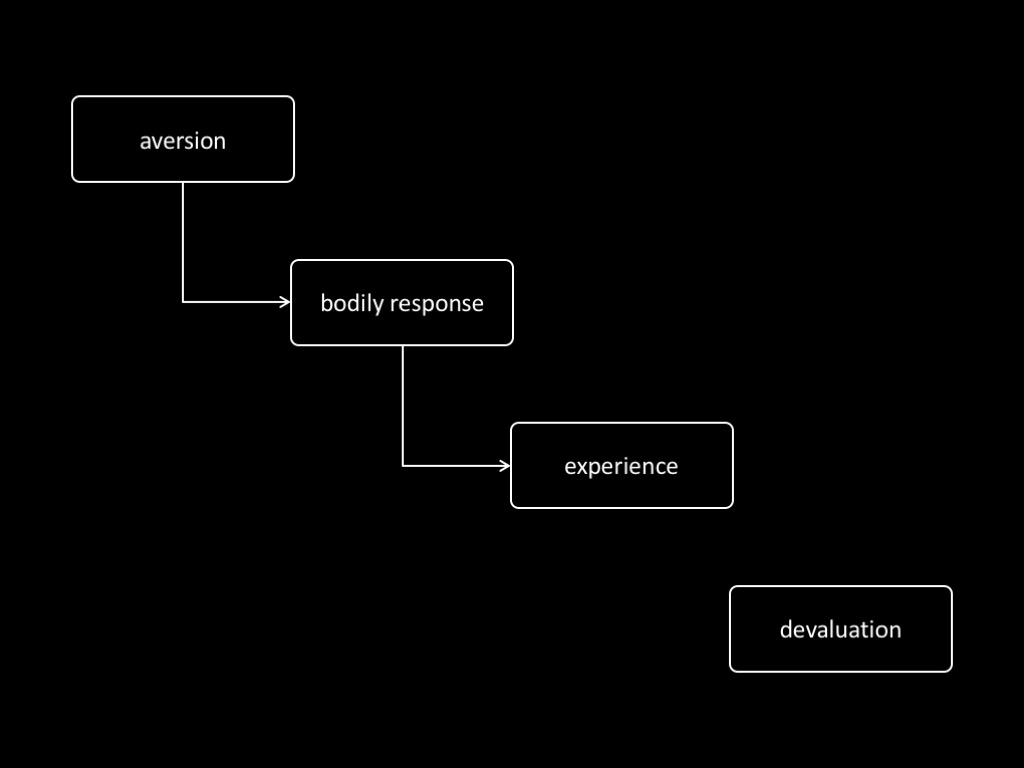
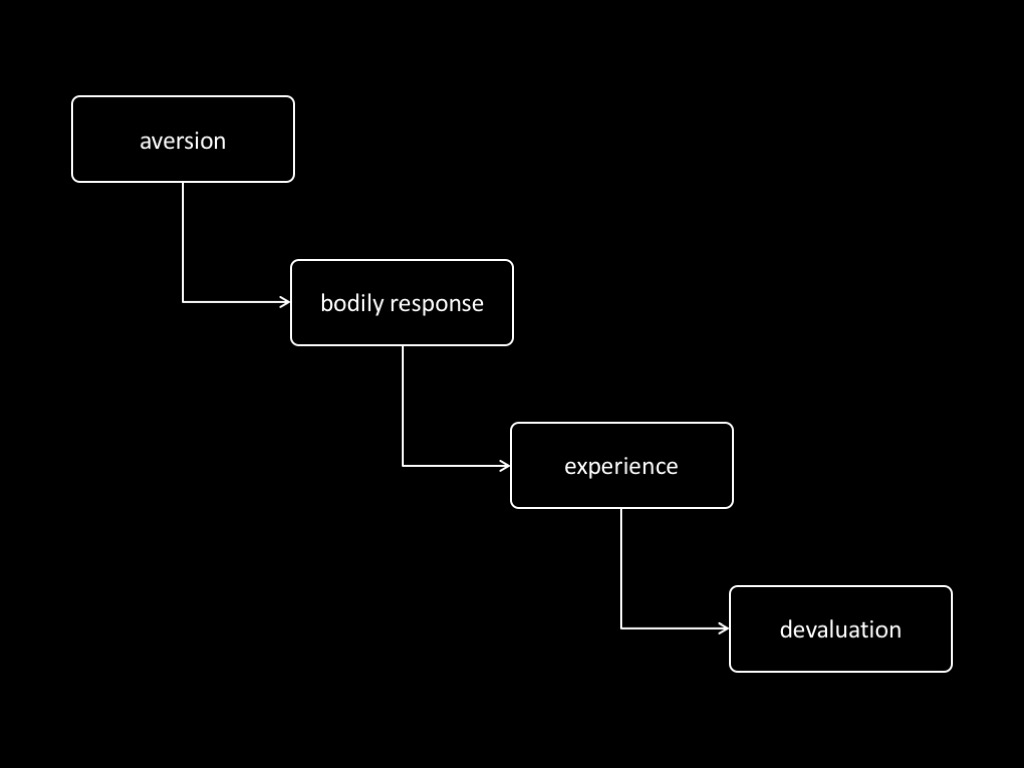
Experience is key ...
‘primary motivational states, such as hunger, do not determine the value of an instrumental goal directly;
rather, animals have to learn about the value of a commodity in a particular motivational state through direct experience with it in that state’
\citep[p.~7]{dickinson:1994_motivational}
‘primary motivational states have no direct impact on the current value that an
agent assigns to a past outcome of an instrumental action; rather, it appears
that agents have to learn about the value of an outcome through direct experience with
it, a process that we refer to as \emph{incentive learning}’
\citep[p.~8]{dickinson:1994_motivational}
Dickinson & Balleine , 1994 p. 7
A role for experience in solving the interface problem.
Why are rats (and you) aware of bodily states such as hunger and revulsion?
Because this awareness enables your preferences to be coupled,
but only losely,
to your primary motivational states.
Isn’t it redunant to have dissociable kinds of motivational state?
‘the motivational control over goal-directed actions is, at least in part,
indirect and mediated by learning about one's own reactions to primary
incentives.
By this process [...], goal-directed actions are liberated from the tyranny of primary motivation’
\citep[p.~16]{dickinson:1994_motivational}
Dickinson & Balleine , 1994 p. 16

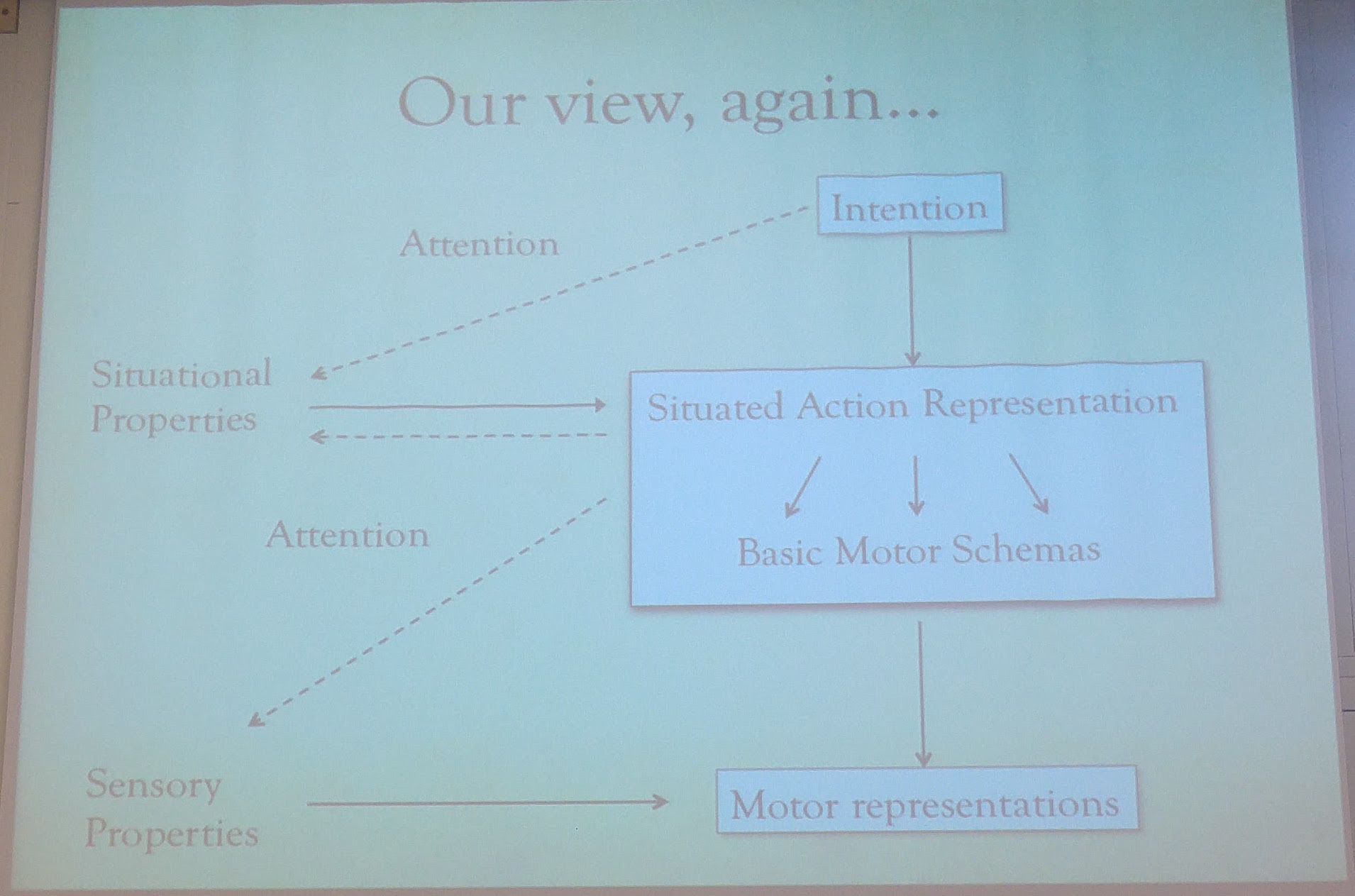
Another Interface Problem: Action
\section{Another Interface Problem: Action}
For a single action, which outcomes it is directed to may be multiply
determined by an intention and, seemingly independently, by a motor
representation. Unless such intentions and motor representations are to pull
an agent in incompatible directions, which would typically impair action
execution, there are requirements concerning how the outcomes they represent
must be related to each other. This is the interface problem: explain how any
such requirements could be non-accidentally met.
The interface problem: explain how intentions and motor representations, with their distinct
representational formats, are related in such a way that, in at least some cases, the outcomes they
specify non-accidentally match.
‘both mundane cases of action slips and pathological conditions, such as apraxia or anarchic hand
syndrome (AHS), illustrate the existence of an interface problem’
\citep[p.~7]{mylopoulos:2016_intentions}.
Two collections of outcomes, A and B, \emph{match} in a particular context just if, in that context,
either the occurrence of the A-outcomes would normally constitute or cause, at least partially, the
occurrence of the B-outcomes or vice versa. To illustrate, one way of matching is for the B-outcomes
to be the A-outcomes. Another way of matching is for the B-outcomes to stand to the A-outcomes as
elements of a more detailed plan stand to those of a less detailed one.
Imagine that you are strapped to a spinning wheel facing near certain death as it plunges you into
freezing water. To your right you can see a lever and to your left there is a button. In deciding
that pulling the lever offers you a better chance of survival than pushing the button, you form an
intention to pull the lever, hoping that this will stop the wheel. If things go well, and if
intentions are not mere epiphenomena, this intention will result in your reaching for, grasping and
pulling the lever. These actions---reaching, grasping and pulling---may be directed to specific
outcomes in virtue of motor representations which guide their execution. It shouldn't be an accident
that, in your situation, you both intend to pull a lever and you end up with motor representations
of reaching for, grasping and pulling that very lever, so that the outcomes specified by your
intention match those specified by motor representations. If this match between outcomes variously
specified by intentions and by motor representations is not to be accidental, what could explain it?
The Interface Problem:
How are non-accidental matches possible?
Motor representations specify goals.
As we have just seen, motor representations specify goals.
Intentions specify goals.
And of course, so do intentions.
Some actions involve both intention and motor representation.
Further, many actions involve both intention and motor representation.
When, for example, you form an intention to turn the lights out, the goal
of flipping the light switch may be represented motorically in you.
The nonaccidental success of our actions therefore depends on the outcomes
specified by our intentions and motor representations matching.
Intention and motor representation are not inferentially integrated (because representational format?).
Two outcomes, A and B, match in a particular context just if, in that context,
either the occurrence of A would normally constitute or cause, at least
partially, the occurrence of B or vice versa.
But how should they match?
I think they should match in this sense:
the occurrence of the outcome specified by the motor representation would
would normally constitute or cause, at least
partially, the occurrence of the outcome specified by the intention.
Now we have to ask, How are nonaccidental matches possible?
If you asked a similar question about desire and intention, the answer would be
straightforward: desire and intention are integrated in practical reasoning, so it
is no surprise that what you intend sometimes nonaccidentally conforms to what you intend.
But we cannot give the same sort of answer in the case of motor representations and
intentions because ...
Intention and motor representation are not inferentially integrated.
Beliefs, desires and intentions are related to the premises and conclusions
in practical reasoning. Motor representations are not.
Similarly, intentions do not feature in motor processes.
Failure of inferential integration follows from the claim that they differ in
format and are not translated. But I suspect that more people will agree that there is a
lack of inferential integration than that they differ in representational format.
(must illustrate format with maps).
So this is the Interface Problem: how do the outcomes specified by intentions and
motor representations ever nonaccidentally match?
‘both mundane cases of action slips and pathological conditions, such as apraxia or anarchic hand syndrome (AHS), illustrate the existence of an interface problem.’
Mylopoulos and Pacherie (2016, p. 7)
Having an intention is neither necessary nor sufficient.
Jeannerod 2006, p. 12:
‘the term apraxia was coined by Liepmann to account for higher order motor
disorders observed in patients who, in spite of having no problem in executing
simple actions (e.g. grasping an object), fail in actions involving more
complex, and perhaps more conceptual, representations.’
Can people with ideomotor apraxia form intentions?
\citep[p.~7]{mylopoulos:2016_intentions}: ‘Typically the result of lesion
to SMA or anterior corpus callosum, AHS is a condition in which patients
perform complex, goal-oriented movements with their cross-lesional limb
that they feel unable to directly inhibit or control. The limb is often
disproportionately reactive to environmental stimuli, carrying out
habitual behaviors that are inappropriate to the context, e.g., grabbing
food from a dinner companion’s plate (Della Sala 2005, 606). It is clear
from many of the behaviors observed in these cases that the anarchic limb
fails to hook up with the agent’s intentions.’
In the rest of this talk I’m not going to suggest a solution to the interface problem.
Instead, I want to mention some considerations
which may complicate attempts to solve it.
\section{Five Complications}
Any attempt to solve the interface problem must surmount at least five complications.

five complications
This isn’t a preliminary to my talk; although I will say something about how to solve
the interface problem right at the end, I’m mainly concerned to persuade you that
the interface problem is tricky to solve.
1
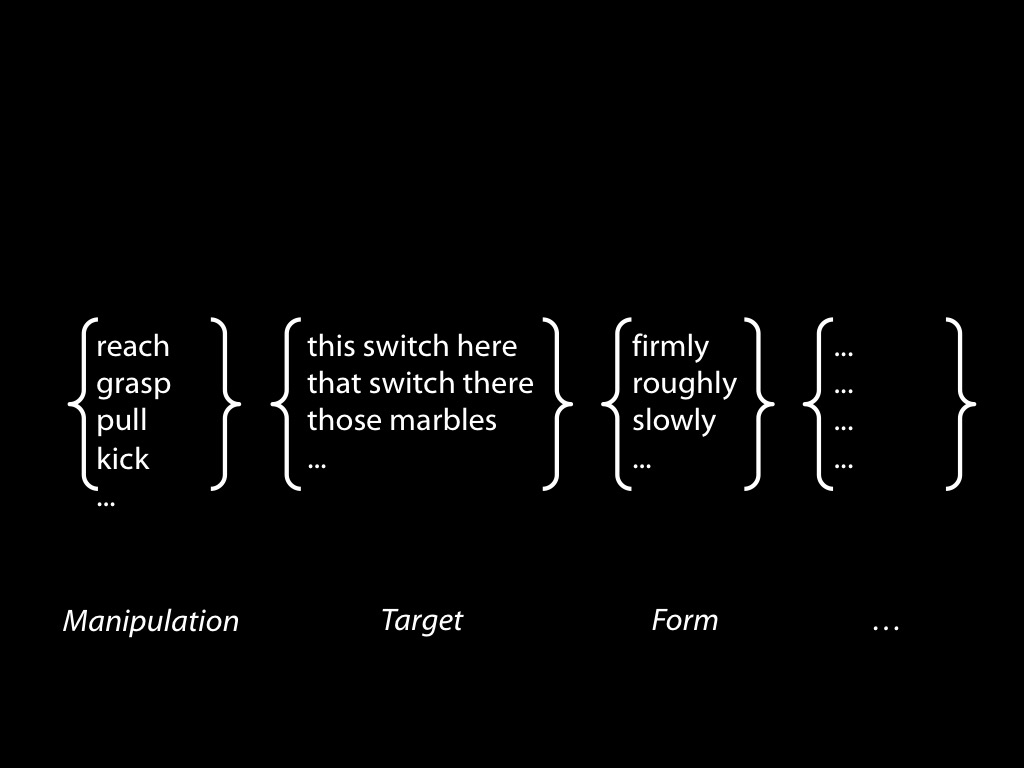
First consideration which complicates the interface problem: outcomes have a complex anatomy
comprising manipulation, target, form and more.
There is evidence that each of these can be represented motorically; and of course these
can all be specified by intentions too.
On the targets of actions, as Elisabeth has stressed,
motor representations represent not only ways of acting but also targets on which actions
might be performed and some of their features related to possible action outcomes involving
them (for a review see Gallese & Sinigaglia 2011; for discussion see Pacherie 2000, pp.
410-3). For example visually encountering a mug sometimes involves representing features
such as the orientation and shape of its handle in motor terms (Buccino et al. 2009;
Costantini et al. 2010; Cardellicchio et al. 2011; Tucker & Ellis 1998, 2001).
One possibility is that the Interface Problem breaks down into questions corresponding
to these three different components of outcomes. That is, an account of how the manipuations
specified by intentions and motor representations nonaccidentally match might end up being
quite different from an account of how the targets or forms match.
(I’m not saying this is right, just considering the possibility.)
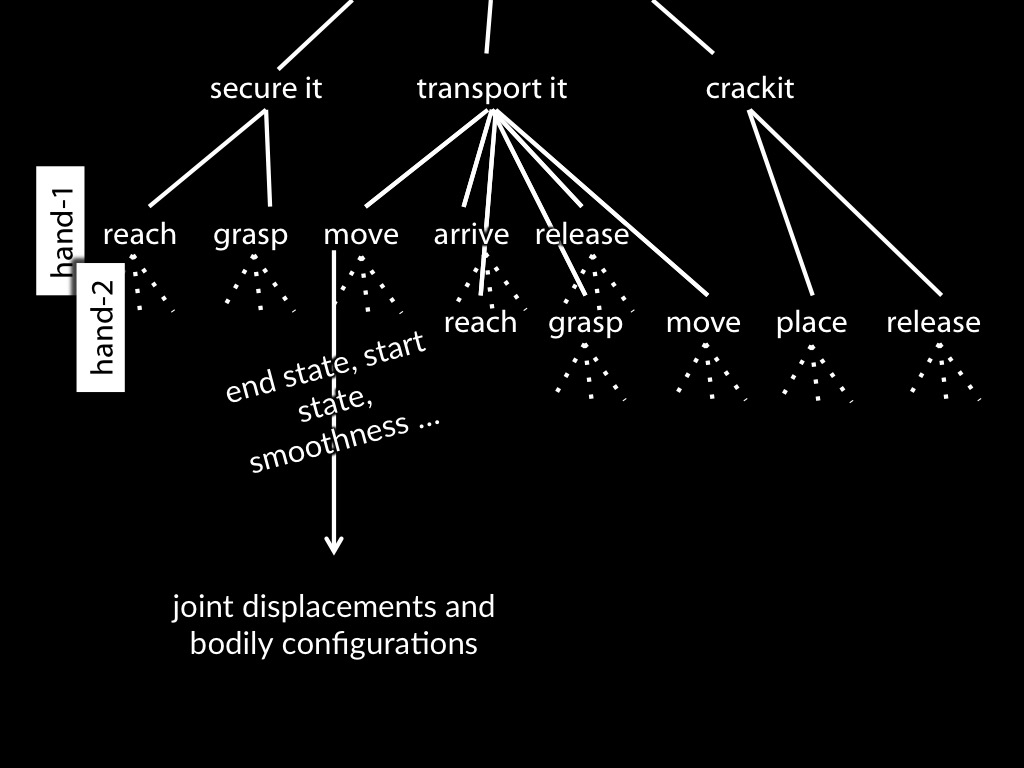
Second consideration which complicates the interface problem: scale.
This shows that we can’t think of the interface problem merely as a way of intentions
setting problems to be solved by motor representations: there may be multiple intentions
at different scales, and in some cases an intention may operate at a smaller scale than
a motor representation.
Suppose you have an intention to tap in time with a metronome.
Maintaining synchrony will involve two kinds of correction: phase and period shifts.
These appear appear to be made by mechanisms acting independently, so that correcting errors involves a distinctive pattern of overadjustment.
Adjustments involving phase shifts are largely automatic, adjustments involving changes in period are to some extent controlled.
How are period shifts controlled?
Importantly this is not currently known.
One possibility is that period adjustments can be made intentionally \citep[as][p.~2599 hint]{fairhurst:2013_being};
another is that there are a small number of ‘coordinative strategies’ \citep{repp:2008_sensorimotor} between which agents with sufficient skill can intentionally switch in something like the way in which they can intentionally switch from walking to running.
But either way, there can be two intentions: a larger-scale one to tap in time with a metronome
and a smaller-scale one to adjust the tapping which results in a period shift.
EP: Skilled piano playing means being able to have intentions with respect to larger units than a
novice could manage. But in playing a 3-voice fugue you may need to pay attention to a particular
nger in order to keep the voices separate. So you need to be able to attend to both ‘large chunks’
(e.g. chords) of action and ‘small chunks’ (e.g. keypresses) simultaneously.
BACKGROUND:
Because no one can perform two actions without introducing some tiny variation between them, entrainment of any kind depends on continuous monitoring and ongoing adjustments \citep[p.~976]{repp:2005_sensorimotor}.
% \textcite[p.~976]{repp:2005_sensorimotor}: ‘A fundamental point about SMS is that it cannot be sustained without error correction, even if tapping starts without any asynchrony and continues at exactly the right mean tempo. Without error correction, the variability inherent in any periodic motor activity would accumulate from tap to tap, and the probability of large asynchronies would increase steadily (Hary & Moore, 1987a; Voillaume, 1971; Vorberg & Wing, 1996). The inability of even musically trained participants to stay in phase with a virtual metronome (i.e., with silent beats extrapolated from a metronome) can be demonstrated easily in the synchronization–continuation paradigm by computing virtual asynchronies for the continuation taps. These asynchronies usually get quite large within a few taps, although occasionally, virtual synchrony may be maintained for a while by chance.’
% \citet[p.~407]{repp:2013_sensorimotor}: ‘Error correction is essential to SMS, even in tapping with an isochronous, unperturbed metronome.’
One kind of adjustment is a phase shift, which occurs when one action in a sequence is delayed or brought forwards in time.
Another kind of adjustment is a period shift; that is, an increase or reduction in the speed with which all future actions are performed, or in the delay between all future adjacent pairs of actions.
These two kinds of adjustment,
phase shifts and period shifts,
appear to be made by mechanisms acting independently, so that correcting errors involves a distinctive pattern of overadjustment.%
\footnote{%
See \citet[pp.~474–6]{schulze:2005_keeping}. \citet{keller:2014_rhythm} suggest, further, that the two kinds of adjustment involve different brain networks.
Note that this view is currently controversial: \citet{loehr:2011_temporal} could be interpreted as providing evidence for a different account of how entrainment is maintained.
}
\citet[p.~987]{repp:2005_sensorimotor} argues, further, that while adjustments involving phase shifts are largely automatic, adjustments involving changes in period are to some extent controlled.
% (‘two error correction processes, one being largely automatic and operating via phase resetting, and the other being mostly under cognitive control and, presumably, operating via a modulation of the period of an internal timekeeper’ \citep[p.~987{repp:2005_sensorimotor})
One possibility is that period adjustments can be made intentionally \citep[as][p.~2599 hint]{fairhurst:2013_being};
another is that there are a small number of ‘coordinative strategies’ \citep{repp:2008_sensorimotor} between which agents with sufficient skill can intentionally switch in something like the way in which they can intentionally switch from walking to running.
2
So it is not that intentions are restricted to specifying outcomes which form the head of the means-end
hierarchy of outcomes represented motorically.
They can also influence aspects of outcomes at smaller scales.
Third consideration which complicates the interface problem: dynamics.
It’s ‘not just how motor representations are triggered by intentions, but how motor
representations’ sometimes nonaccidentally continue to match intentions as circumstances change in unforeseen ways ‘throughout
skill execution’
\citep[p.~19]{fridland:2016_skill}.
Fridland, 2016 p. 19
Here we need to distinguish different kinds of change.
Some changes can be flexibly accommodated motorically without any need for intention
to be involved, or even for the agents to be aware of the change. This includes peturbations
in the apparent direction of motion while drawing \citep{fourneret:1998_limited}.
But other changes may require a change in intention: circumstances may change in such a way
that you wish either to abandon the action altogether, or else switch target midway through.
\textbf{KEY}: in executing an intention you may learn something which causes you to change
your intention; for example, you may learn that the action is just too awkward, or that the
ball is out of reach. So motor processes can result in discoveries that nonaccidentally cause
changes in intention.
This also shows that we can’t think of the interface problem merely as a way of intentions
‘handing off’ to motor representations: in some cases, the matching of motor representations
and intentions will nonaccidentally persist.
unidirectional bidirectional
These reflections on dynamics (and on scale too[?]) suggest that the interface problem
is not a unidirectional but a bidirectional one. The agent who intends probably cannot be blind to
the ways in which motor representations structure her actions since the structure is both provides
and limits opportunities for interventions.

4
The interface problem is the problem of explaining how there could be nonaccidental matches.
But there is a related developmental problem: What is the process by which humans acquire
abilities to ensure that their intentions and motor representations sometimes nonaccidentally
match?
A solution to the interface problem must provide a framework for answering the corresponding
question about development.
Imagination: intentions and motor representations can nonaccidentally match not only
when we are acting but also when we are merely imagining acting.

Mylopoulos and Pacherie’s Proposal
\section{Mylopoulos and Pacherie’s Proposal}
Mylopoulos and Pacherie propose that the Interface Problem can be solved
by appeal to executable action concepts.
This is perhaps also a promising idea for tacking the New Interface Problem too.
‘As defined by Tutiya et al., an executable concept of a type of movement is a
representation, that could guide the formation of a volition, itself the proximal cause of
a corresponding movement. Possession of an executable concept of a type of movement thus
implies a capacity to form volitions that cause the production of movements that are
instances of that type.’
\citep[p.~7]{pacherie:2011_nonconceptual}
Mylopoulos and Pacherie:
‘an executable [action] concept of a type of movement is a representation, that could guide the formation of a volition, itself the proximal cause of a corresponding movement.
Possession of an executable concept of a type of movement thus implies a capacity to form volitions that cause the production of movements that are instances of that type.’
There explanation: two different kinds of action concept, one purely
observational.
‘For instance, most of us have a concept of ‘tail wagging’ that we can deploy when we
judge, for instance, that Julius the dog is wagging his tail. Or if you are not
convinced that tail wagging constitutes purposive behavior, consider the action concept
‘tail swinging’, as in ‘cows constantly swing their tails to flick away flies’.’
Pacherie 2011, p. 8
Objections:
(i) It looks like the executable action concept builds in a solution to the interface problem
rather than solving it.
The executable action concept is a ready-made solution.
To answer this objection, we need an account of how concepts and motor representations
become bound together.
Simple theory of executable action concepts:
there are concept--motor schema associations.
REPLY: Simple theory of executable action concepts: they’re just associations between
concepts and motor schema (partially specified outcomes that are represented motorically).
[Objections (ctd):
(ii) Fridland: there is a dynamic component to the interface problem.
An an answer to it must specify ‘not just how motor representations are triggered by
intentions, but how motor representations’ continue to match intentions as circumstances
change in unforeseen ways ‘throughout skill execution’ (Fridland, 2016 p. 19).]
(iii) We need to understand how there is matching not only concerning how you act
(push vs pull, say) but also on which object you act (this switch or that one, say).
On (iii), note that, as Elisabeth has stressed,
motor representations represent not only ways of acting but also objects on which actions
might be performed and some of their features related to possible action outcomes involving
them (for a review see Gallese & Sinigaglia 2011; for discussion see Pacherie 2000, pp.
410-3). For example visually encountering a mug sometimes involves representing features
such as the orientation and shape of its handle in motor terms (Buccino et al. 2009;
Costantini et al. 2010; Cardellicchio et al. 2011; Tucker & Ellis 1998, 2001).
Executable action concepts might work for manipulation and form, but are less likely to work
for tagets since there are just so many of them.
On the other hand, we might think of the interface problem as having many aspects so that
we don't solve it all at once.
Further issues:
(iv) knowledge of action: shouldn’t the relation should be such as to allow someone who uses the
concept to know which action she is thinking about.
(v)
So I think that while there’s much more to be done in thinking through Myrto and Elisabeth’s
proposal about executive action concepts, this is a step forwards but not necessarily a full
solution to the interface problem.
What other resources are available?

A Puzzle about Thought, Experience and the Motoric
\section{A Puzzle about Thought, Experience and the Motoric}
Motor representations occur when merely observing others act and sometimes influence thoughts about the
goals of observed actions. Further, these influences are content-respecting: what you think about an
action sometimes depends in part on how that action is represented motorically in you. The existence of
such content-respecting influences is puzzling. After all, motor representations do not feature
alongside beliefs or intentions in reasoning about action; indeed, thoughts are inferentially isolated
from motor representations. So how could motor representations have content-respecting influences on
thoughts?
In action observation, motor representations of outcomes ...
... underpin goal-tracking, and
sometimes facilitate the identification of goals in thought.
So
where motor representations influence a thought about an action being directed to a particular outcome, there is normally a motor representation of this outcome, or of a matching outcome.
This conclusion entails that motor representations have content-respecting
influences on thoughts. It is the fact that one outcome rather than another is represented
motorically which explains, at least in part, why the observer takes this outcome (or a matching
one) to be an outcome to which the observed action is directed.
But
how could motor representations have content-respecting influences on thoughts given their inferential isolation?
But how could motor representations
have content-respecting influences on thoughts? One familiar way to explain content-respecting
influences is to appeal to inferential relations. To illustrate, it is no mystery that your beliefs
have content-respecting influences on your intentions, for the two are connected by processes of
practical reasoning. But motor representation, unlike belief and intention, does not feature in
practical reasoning. Indeed, thought is inferentially isolated from it. How then could any motor
representations have content-respecting influences on thoughts?
motor representation -> experience of action -> thought
In something like the way experience may tie thoughts about seen objects to the representations
involved in visual processes, so also it is experience that connects what is represented
motorically to the objects of thought.
[significance]
This may matter for understanding thought about action. On the face of it, the inferential
isolation of thought from motor representation makes it reasonable to assume that an account of
how humans think about actions would not depend on facts about motor representation at all. But
the discovery that motor representations sometimes shape experiences revelatory of action
justifies reconsidering this assumption. It is plausible that people sometimes have reasons for
thoughts about actions, their own or others', that they would not have if it were not for their
abilities to represent these actions motorically. To go beyond what we have considered here, it
may even turn out that an ability to think about certain types of actions depends on an ability
to represent them motorically.
[consequence]
One consequence of our proposal concerns how experiences of one's own actions relate to
experiences of others' actions. For almost any action, performing it would typically involve
receiving perceptual information quite different to that involved in observing it. This may
suggest that experiences involved in performing a particular action need have nothing in common
with experiences involved in observing that action. However, two facts about motor
representation, its double life and the way it shapes experience, jointly indicate otherwise. For
actions directed to those goals that can be revealed by experiences shaped by motor
representations, there are plausibly aspects of phenomenal character common to experiences
revelatory of one's own and of others' actions. In some respects, what you experience when others
act is what you experience when you yourself act.
The claim that there is expeirence of action is based on an earlier argument.
I now want to review and then object to that argument.
(The conclusion may be correct, but the argument does not establish it.)
Puzzle
How could motor representations have content-respecting influences on thoughts given their inferential isolation?

The Twin Interface Problems
\section{The Twin Interface Problems}
How could intentions have content-respecting influences on motor representations given their inferential isolation?
And how could motor representations have content-respecting influences on thoughts given their inferential isolation?
So here are my two puzzles ...
The first one comes straight from lecture 01; the second is new, but based on
ideas discussed in Lecture 02.
Interface Problem
intention -> motor representation
How could intentions have content-respecting influences on motor representations given their inferential isolation?
New Interface Problem
motor representation -> judgement
How could motor representations have content-respecting influences on thoughts given their inferential isolation?
\section{Appendix: Representational Format}
As background we first need a generic distinction between content and format.
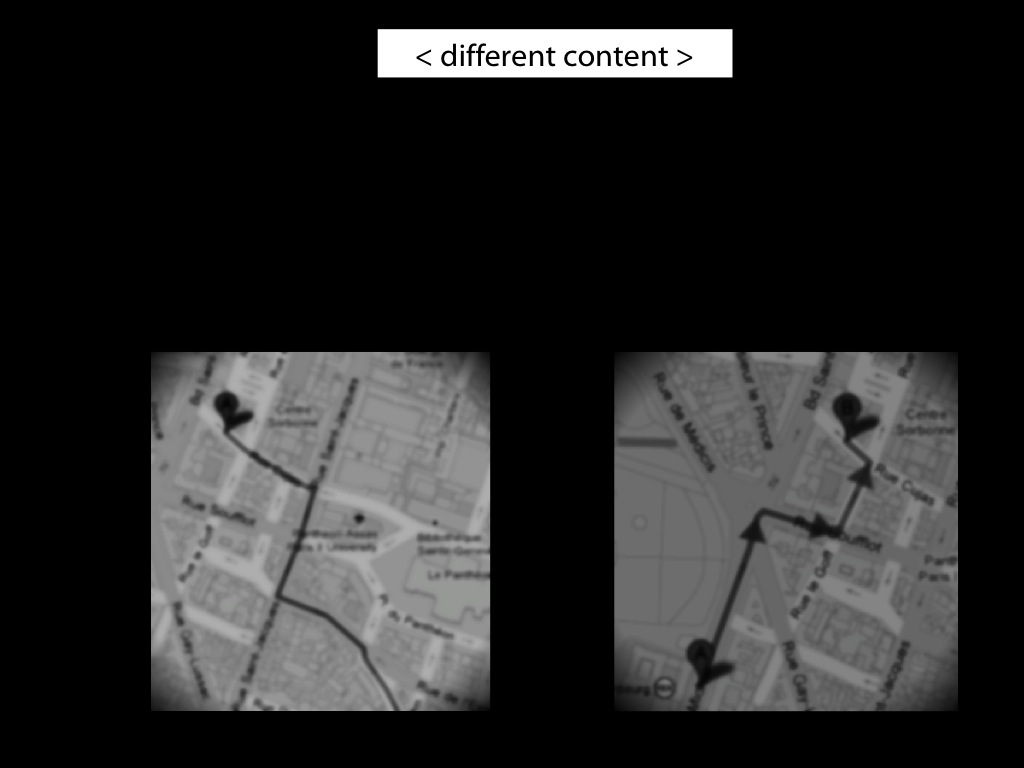
Imagine you are in an unfamiliar city and are trying to get to the central station.
A stranger offers you two routes. Each route could be represented by a distinct line
on a paper map. The difference between the two lines is a difference in content.
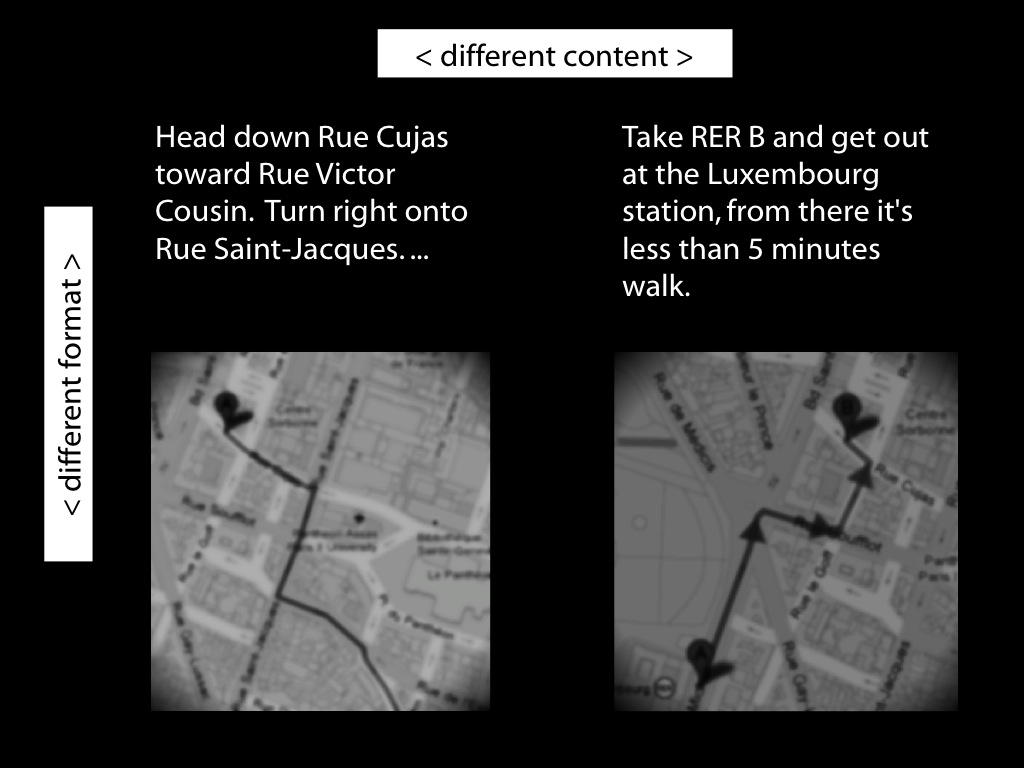
Each of the routes could alternatively have been represented by a distinct series
of instructions written on the same piece of paper; these cartographic and
propositional representations differ in format. The format of a representation
constrains its possible contents. For example, a representation with a cartographic
format cannot represent what is represented by sentences such as `There could not be a
mountain whose summit is inaccessible.'\footnote{ Note that the distinction between
content and format is orthogonal to issues about representational medium. The maps in
our illustration may be paper map or electronic maps, and the instructions may be spoken,
signed or written. This difference is one of medium.} The distinction between content and
format is necessary because, as our illustration shows, each can be varied independently
of the other.
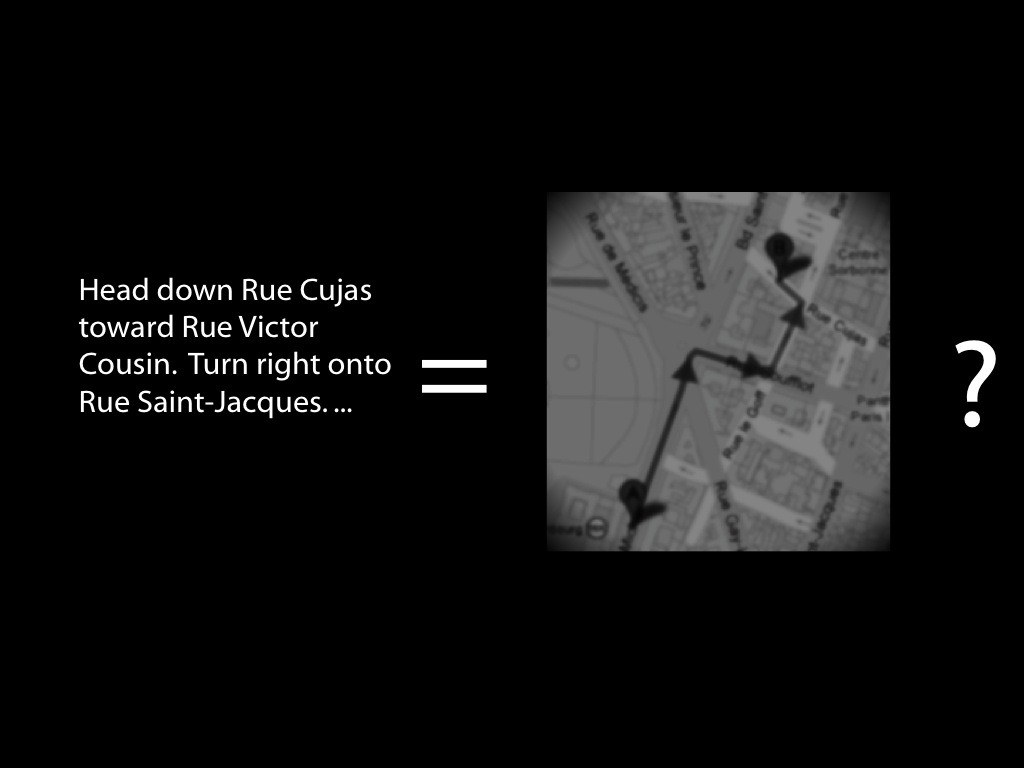
Format matters because only where two representations have the same format can they be straightforwardly inferentially integrated.
To illustrate, let’s stay with representations of routes.
Suppose you are given some verbal instructions describing a route. You are then shown a representation of a route on a map and asked whether this is the same route that was verbally described. You are not allowed to find out by following the routes or by imagining following them.
Special cases aside, answering the question will involve a process of translation because two distinct representational formats are involved, propositional and cartographic. It is not be enough that you could follow either representation of the route. You will also need to be able to translate from at least one representational format into at least one other format.
Think of predictive coding.
Think of CTM.
Think of any account of the mind you like.
I bet that the only way that non-accidental matches can occur
on the account is through a process of inference.
Differences in representational format
block inferential integration
(without translation),
and so create interface problems.
\citet[p.~2]{jackendoff:1996_architecture} proposes
‘a systemof interface modules. An interface module communicates between two
levels of encoding, say Ll and L2, by carrying a partial translation of information
in Ll form into information in L2 form.’
Translation might work in some cases
(maybe between phonology and syntax,
or between spatial and linguistic representation?).
But it does not appear to work for motivational states,
and I guess not for executive (Bach: effective) states either.
The mind is made up of lots of different, loosely
connected systems that work largely independently of each other. To a certain extent it’s fine for
them to go their own way; and of course since they all get the same inputs (what with being parts of
a single subject), there are limits on how separate the ways the go can be. Still, it’s often good
for them to be aligned, at least eventually.
But how are they ever nonaccidentally brought into alignment?
One function of experience
is to solve these problems.
Experience is what enables there to be nonaccidental eventual alignment of largely independent
cognitive systems. This is what experience is for.
Can we think along these lines in the case of action?
This was clear enough in Dickinson’s case.
But how could it work in the case intention vs motor representation?
Two complications make it appear difficlut ..