Markers of motor representation
\begin{enumerate}
\item are unaffected by variations in kinematic features but not goals
\citep[e.g.][]{cattaneo:2010_state-dependent,umilta:2008pliers,cattaneo:2009_representation,rochat:2010_responses}
\item are affected by variations in goals but not kinematic features
\citep[e.g.][]{Fogassi:2005nf,bonini:2010_ventral,cattaneo:2007_impairment,Umilta:2001zr,villiger:2010_activity,koch:2010_resonance}
\end{enumerate}
So:
\begin{enumerate}[resume]
\item carry information about goals (from 1,2)
\end{enumerate}
Also
\begin{enumerate}[resume]
\item Information about outcomes guides planning-like processes
\citep[consider][]{grafton:2007_evidence,jeannerod:1998nbo,wolpert:1995internal, miall:1996_forward,arbib:1985_coordinated,mason:2001_hand,santello:2002_patterns}.
\end{enumerate}

motor representation(/schema)
Let me go back and start with some almost uncontroversial facts about motor representations and
their action-coordinating role.
Why postulate motor representations at all? [Dependence of present actions on future actions
is one reason for doing so.]
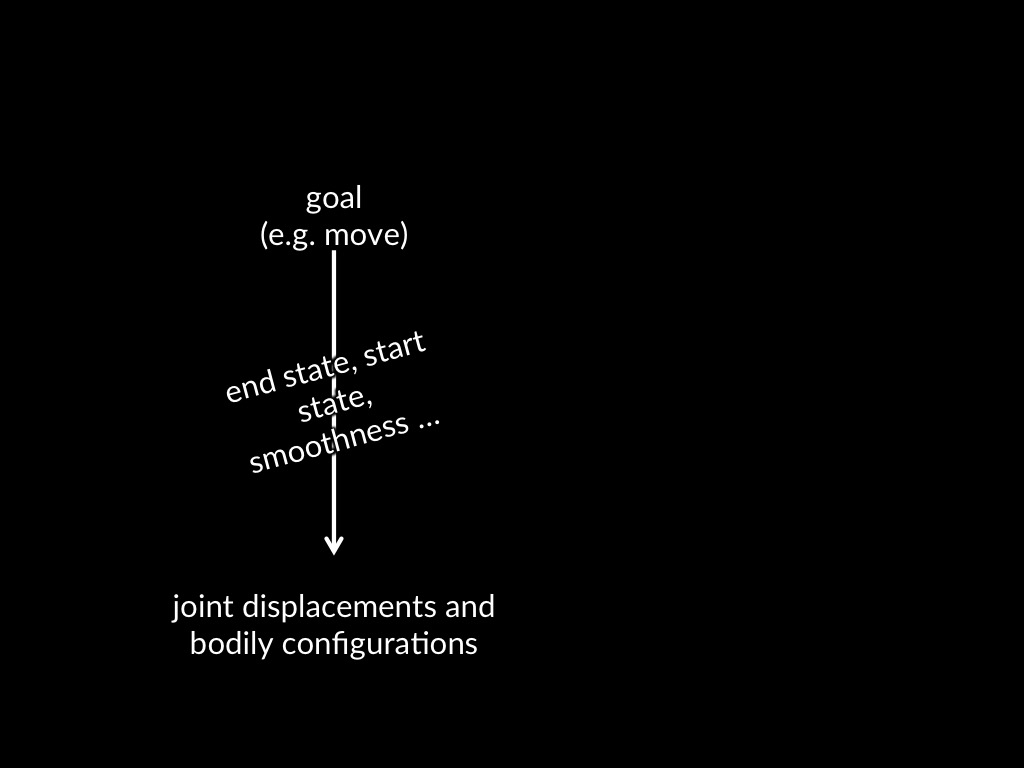
A goal represented motorically triggers a process which, via computations of things
like end states, starting states and smoothness, eventually results in joint
displacements; and when things go well, these joint displacements together with the
resulting bodily configurations bring about, or constitute, the occurrence of the goal.
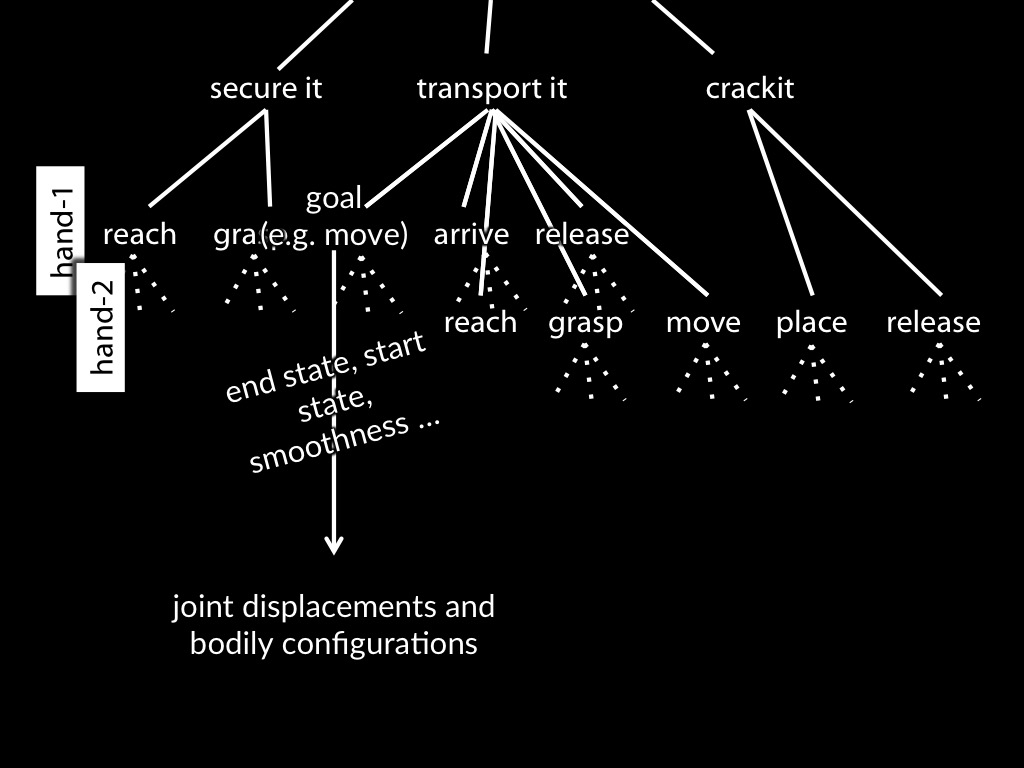
But of course this is a simplification. Motor representations can trigger processes
which result in further goals being represented, as for example when a motor
representation of the transporting of an object triggers representations of reaching,
grasping, placing and releasing.
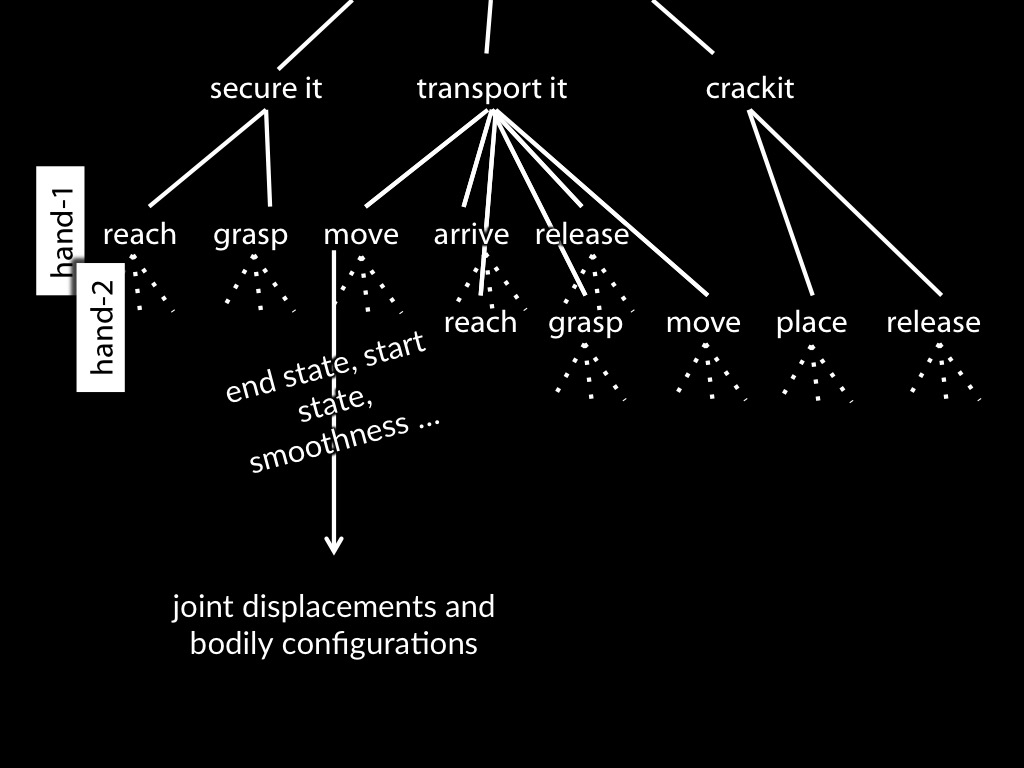
The processes linking motor representations are planning like in two respects:
(i) means-end ...
... and (ii) relational constraints
Fadiga et al 2002, figure 2
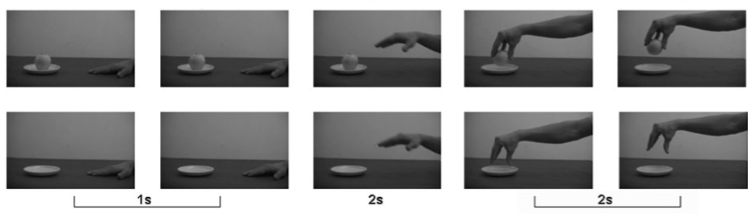

Villiger et al, 2010 figure 1AB
TMS to measure MEP
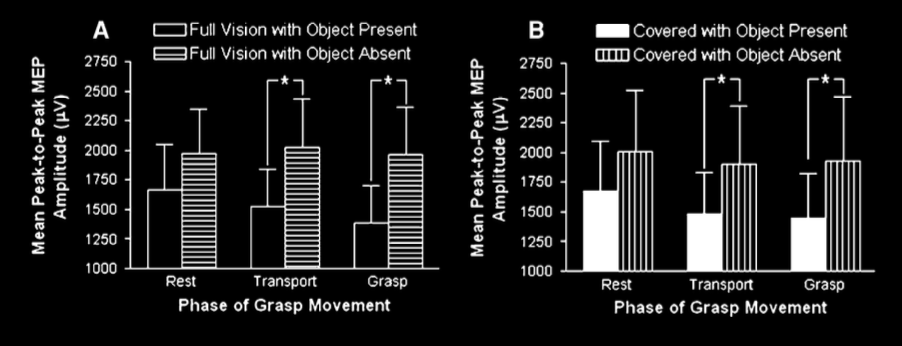
Villiger et al, 2010 figure 2
Incidentally, ‘the observed direction of the modulation was not consistent with previous TMS
literature. Specifically, MEP amplitudes were significantly lower in the Object-Present than in the
Object-Absent conditions (Fig. 2), suggesting that there was an inhibitory effect of object
manipulation on the activity of M1 during action observation.’
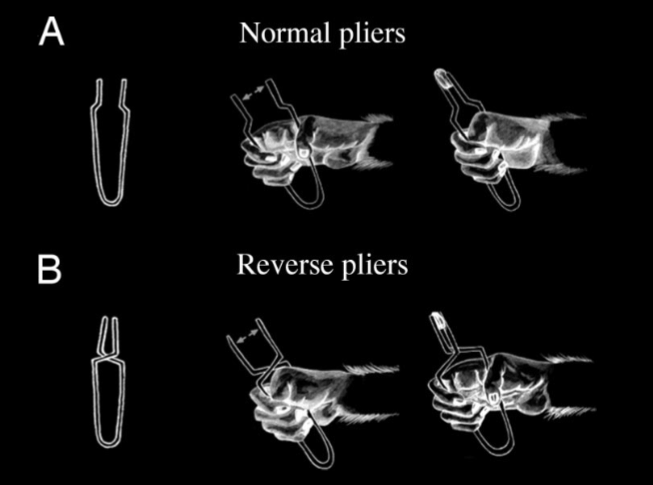
Umiltà et al, 2008 figure 1
Umiltà et al, 2008 : single cell recordings in monkeys
MEPs (TMS amplified) in humans
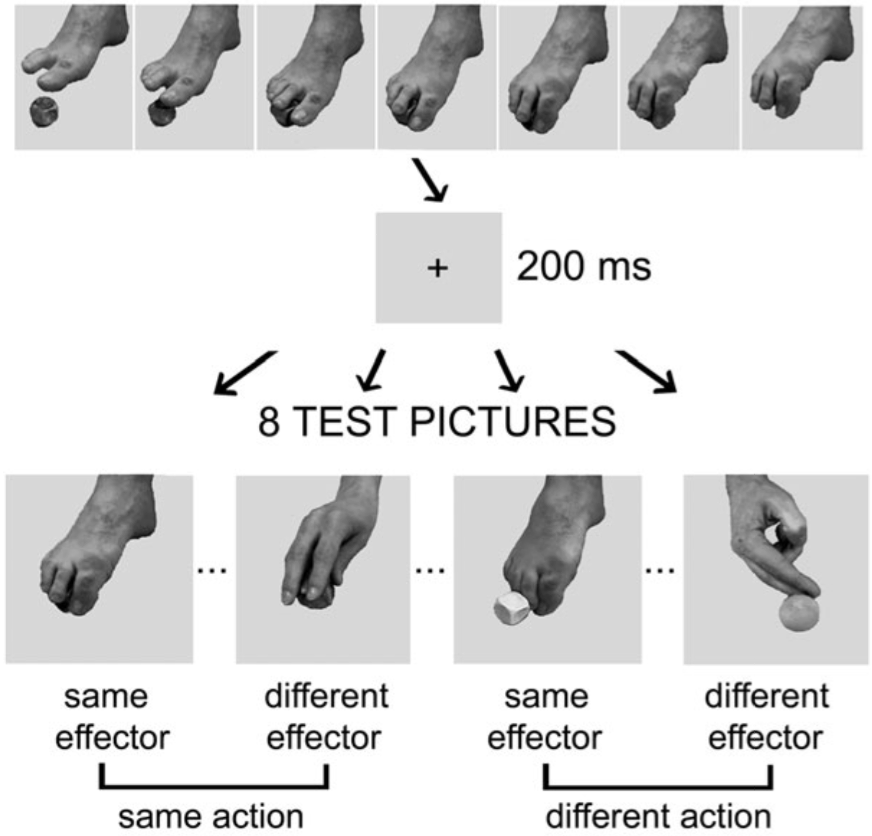
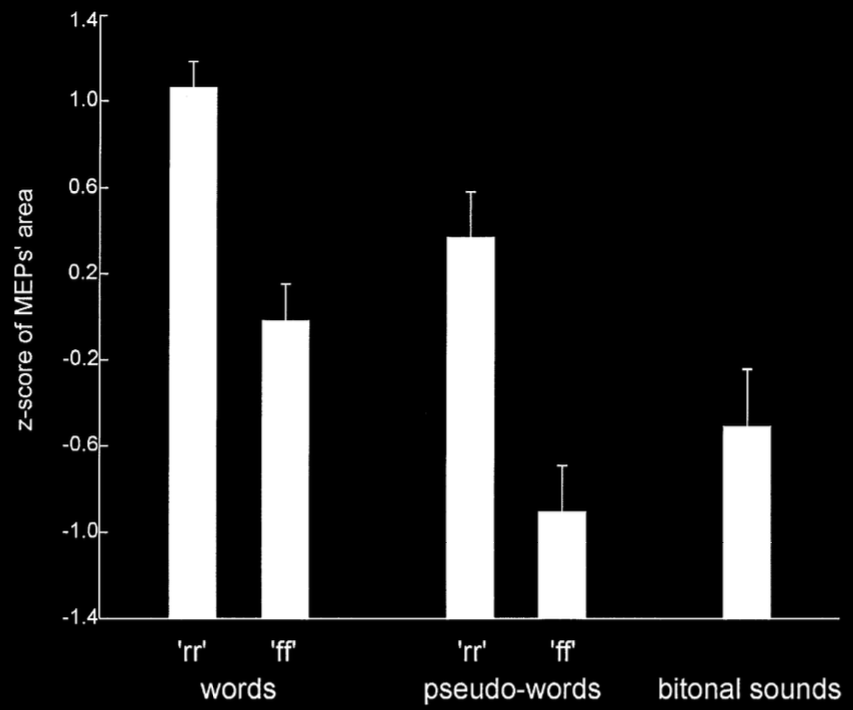
Cattaneo et al, 2010 figure 1
TMS MEP, humans.
Shown video, then a static picture.
Is this the same goal as you saw in the video?
Press one of two keys.
‘They were explicitly told to ignore the effector and make a judgment on the type of act only.’
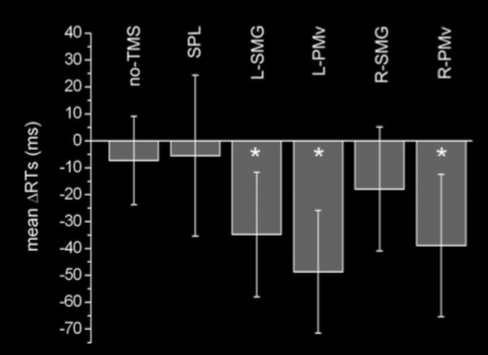
Cattaneo et al, 2010 figure 3
Key finding: TMS to both ventral premotor cortex (PMv) and left supramarginal gyrus (SMG)
increases RTs regardless of whether it’s the same effector or a different effector.
(You can’t see same/different effector in this figure.)
KEY: superior temporal sulcus (STS), and a parietofrontal system consisting of the intraparietal
sulcus (IPS) and inferior parietal lobule (IPL) plus the ventral premotor cortex (PMv) and caudal
part of inferior frontal gyrus (IFG). In some instances also, the superior parietal lobule (SPL)
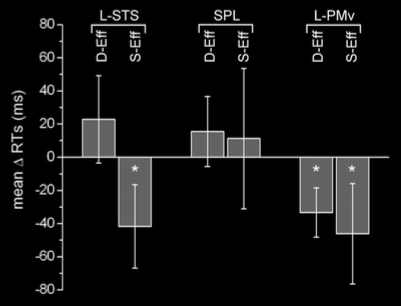
Cattaneo et al, 2010 figure 4
By contrast, TMS to superior temporal sulcus (STS) increased RT only for judgements
where the video effector was the same as the photo effector.
Markers of motor representation
The experiments providing such evidence typically involve a marker of motor representation,
such as a pattern of neuronal firings, a motor evoked potential or a behavioural performance
profile, which, in controlled settings, allows sameness or difference of motor representation
to be distinguished. Such markers can be exploited to show that the sameness and difference
of motor representation is linked to the sameness and difference of an outcome such as the
grasping of a particular object.
(Pioneering uses of this method include \citealp{rizzolatti:1988_functional,Rizzolatti:2001ug};
it has since been developed in many ways: see, for example,
\citet{hamilton:2008_action, cattaneo:2009_representation, cattaneo:2010_state-dependent,
rochat:2010_responses, bonini:2010_ventral, koch:2010_resonance}.)
To illustrate, consider a sequence of actions which might be involved in shoplifting an apple: you have to secure the apple, transport it, and position it in your pocket.
Each of these outcomes can be represented motorically.
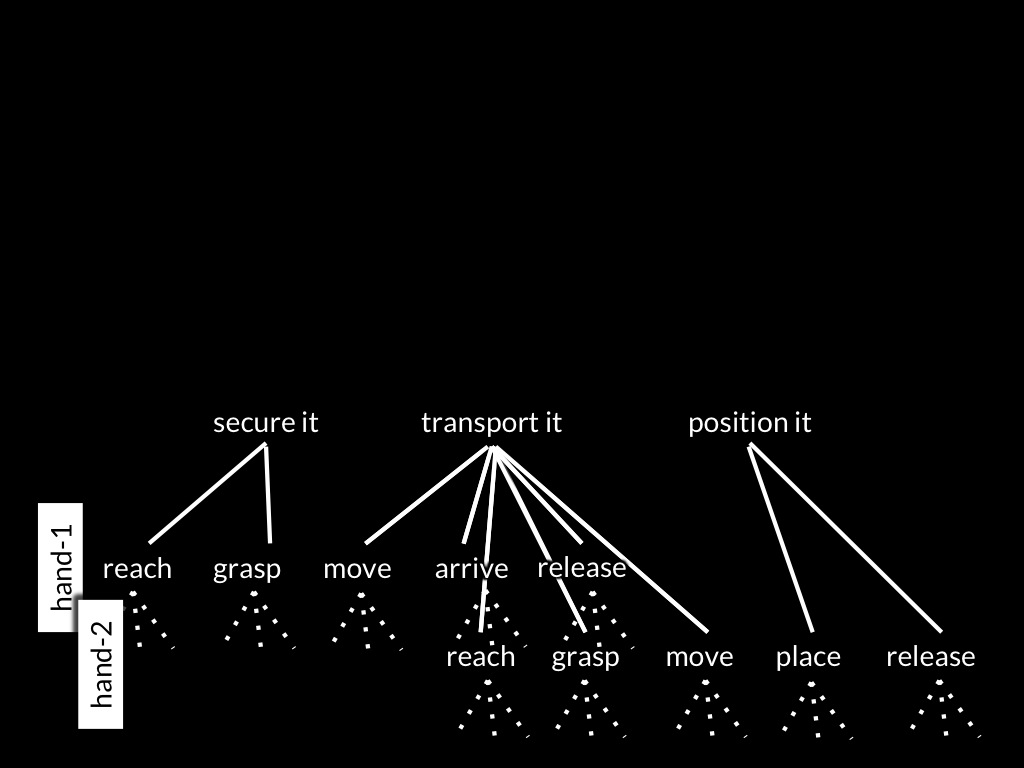
Motor processes are planning-like in that they involve computing means from ends.
Thus a representation of an end like securing it [the apple] can trigger a process
that results in the representation of outcomes that are means to this end.
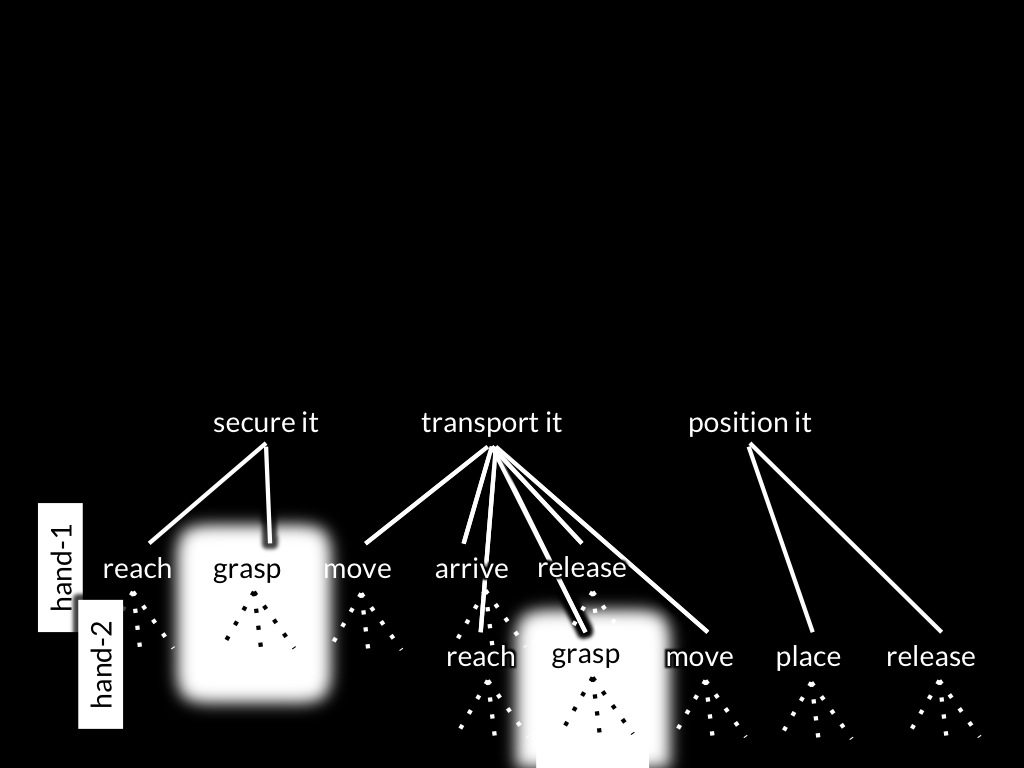
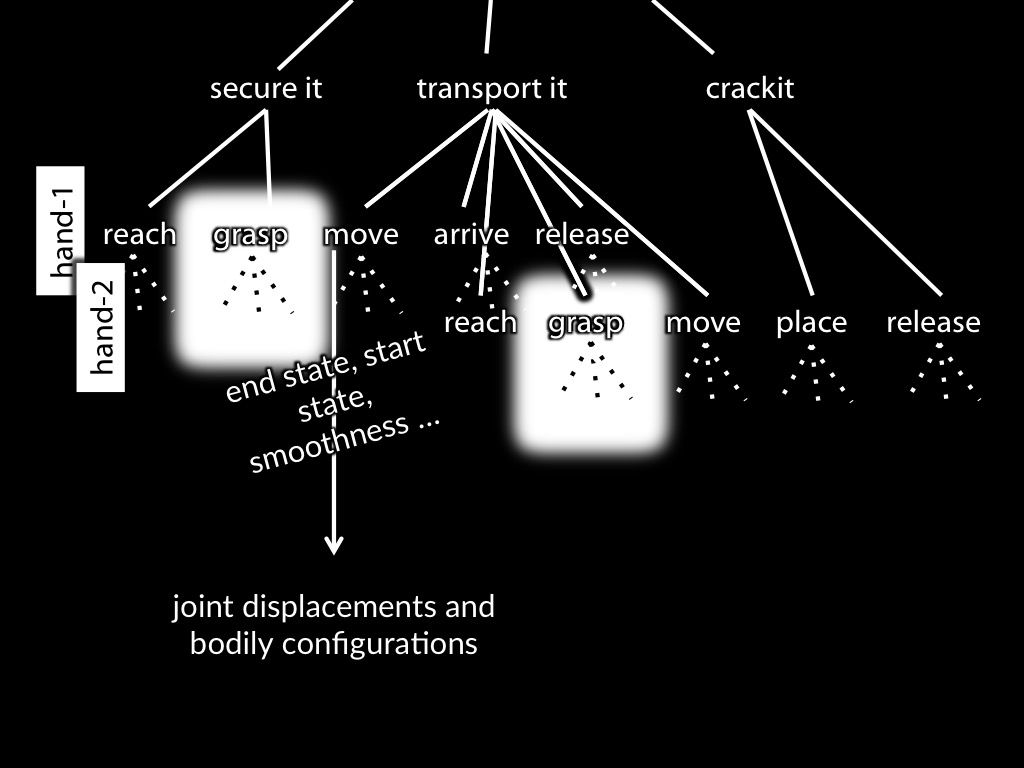
Motor processes are also planning-like in that which means are selected in preparing an
action that will occur early in the sequence may affect needs that will arise only later
in a later part of the actions.
For instance, how the apple is grasped at an early point in the sequence may be determined
in part by what would be a more comfortable way for the other hand to grasp it later.
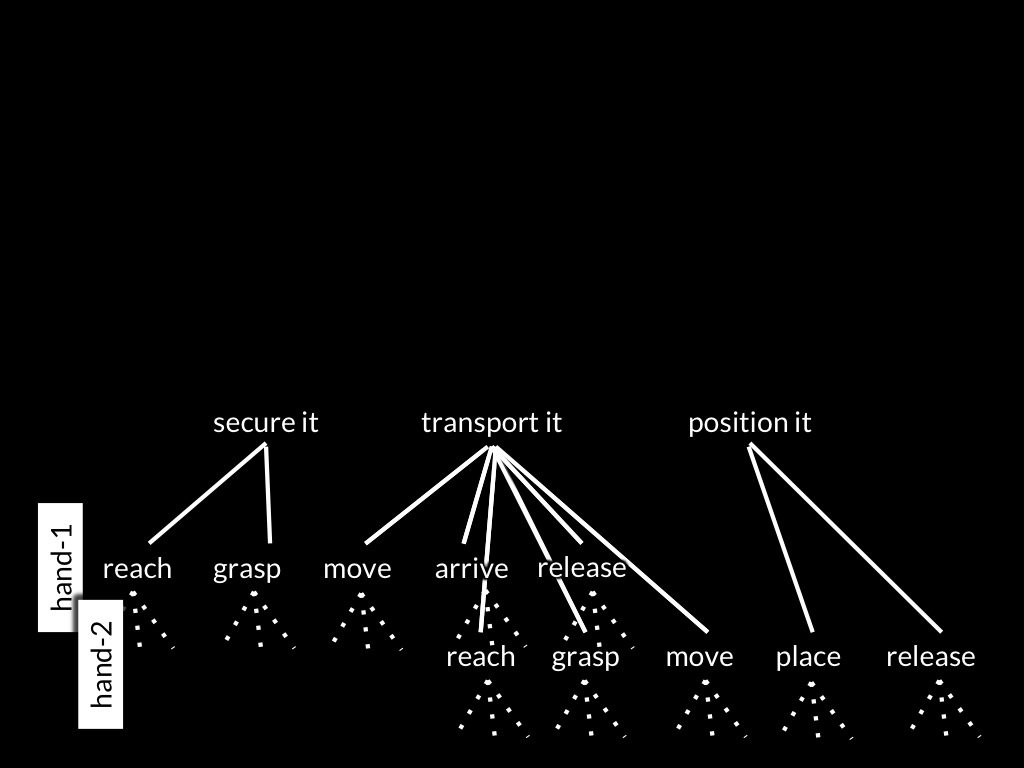
So motor representations of outcomes guide planning-like processes.
This is why I think it’s not just that they carry information about outcomes
like grasping an apple, but that they also represent such outcomes.