\emph{The Motor Theory of Goal Tracking}
Infants’ pure goal-tracking depends on the double life of motor processes.
According to the \emph{Motor Theory of Goal Tracking}, infants (and adults) sometimes track the
goals of others’ by means of motor processes \citep[see][for details]{sinigaglia:2015_puzzle}.
More carefully the \emph{Motor Theory of Goal Tracking} states that:
\begin{enumerate}
\item in action observation, possible outcomes of observed actions are represented motorically;
\item these representations trigger motor processes much as if the observer were performing actions directed to the outcomes;
\item such processes generates predictions;
\item a triggering representation is weakened if the predictions it generates fail.
\end{enumerate}
The result is that, often enough, the only only outcomes to which the observed action is a means
are represented strongly.
The Simple View
Outcomes such as reaching for and grasping of a cup can be represented motorically.
As a body of research on mirror neurons and motor simulation more generally demonstrates,
motor representations of outcomes can generate expectations concerning another agent’s behaviour
These expectations are plausibly compared with the behavior that is actually observed.
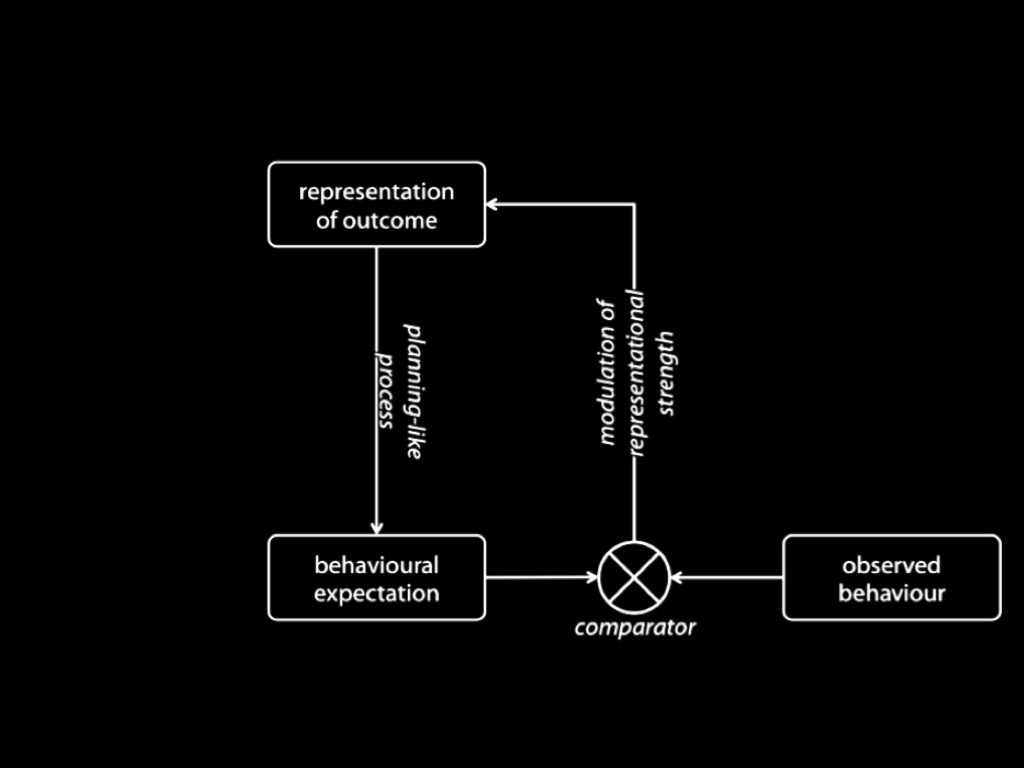
And we conjecture that the result of this comparison modulates the strength of the motor representation of the outcome.
Within limits, this modulation will ensures that an outcome represented motorically is likely to be a goal of the observed action.
In this way, motor representations enable goal tracking.
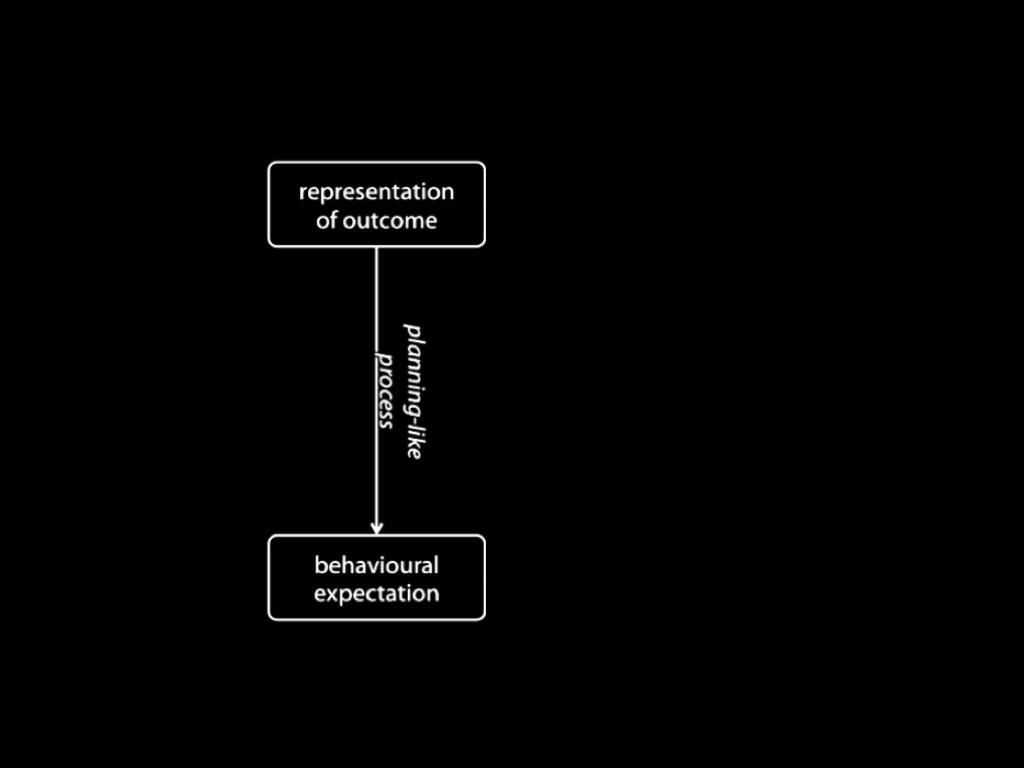
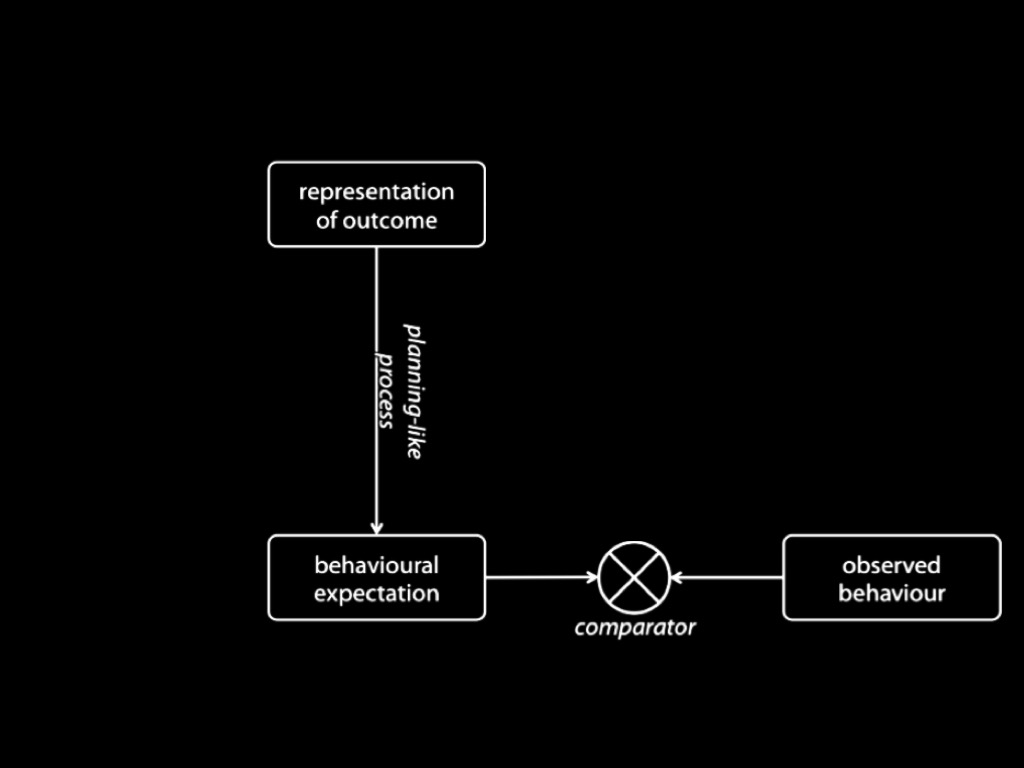
Sinigalia & Butterfill 2015, figure 1
Goal-tracking is acting in reverse.
-- in action observation, possible outcomes of observed actions are represented
-- these representations trigger planning as if performing actions directed to the outcomes
-- such planning generates predictions
-- a triggering representation is weakened if its predictions fail
The result is that the only only outcomes to which the observed action is a means
are represented strongly.
There is evidence that a motor representation of an outcome can cause a determination of which
movements are likely to be performed to achieve that outcome \citep[see, for
instance,][]{kilner:2004_motor, urgesi:2010_simulating}. Further, the processes involved in
determining how observed actions are likely to unfold given their outcomes are closely related,
or identical, to processes involved in performing actions.
This is known in part thanks to studies of how observing actions can facilitate performing
actions congruent with those observed, and can interfere with performing incongruent actions
\citep{
brass:2000_compatibility,
craighero:2002_hand,
kilner:2003_interference,
costantini:2012_does}.
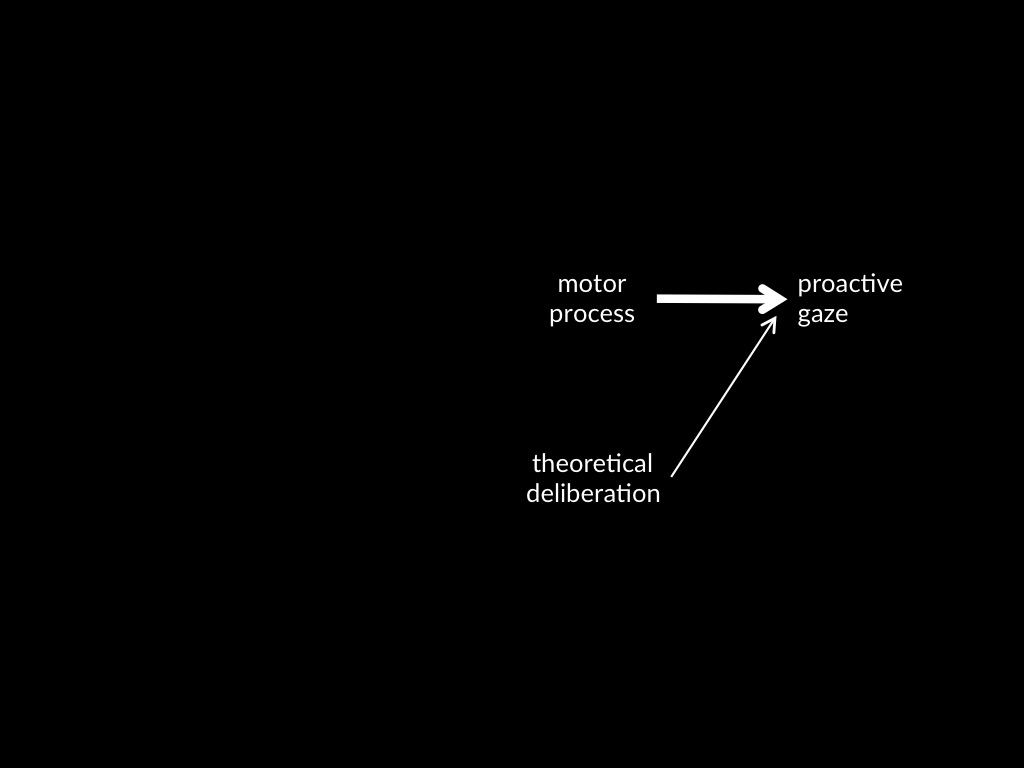
Planning-like processes in action observation have also been demonstrated by measuring observers' predictive gaze. If you were to observe just the early phases of a grasping movement, your eyes might jump to its likely target, ignoring nearby objects \citep{ambrosini:2011_grasping}. These proactive eye movements resemble those you would typically make if you were acting yourself \citep{Flanagan:2003lm}.
Importantly, the occurrence of such proactive eye movements in action observation depends on your
representing the outcome of an action motorically; even temporary interference in the observer's
motor abilities will interfere with the eye movements \citep{Costantini:2012fk}.
These proactive eye movements also depend on planning-like processes; requiring the observer to
perform actions incongruent with those she is observing can eliminate proactive eye movements
\citep{Costantini:2012uq}. This, then, is further evidence for planning-like motor processes in
action observation.
So observers represent outcomes motorically and these representations trigger planning-like processes
which generate expectations about how the observed actions will unfold and their sensory consequences.
Now the mere occurrence of these processes is not sufficient to explain why, in action observation,
an outcome represented motorically is likely to be an outcome to which the observed action is
directed.
To take a tiny step further, we conjecture that, in action observation, \textbf{motor representations of
outcomes are weakened to the extent that the expectations they generate are unmet}
\citep[compare][]{Fogassi:2005nf}.
A motor representation of an outcome to which an observed action is not directed is likely to
generate incorrect expectations about how this action will unfold, and failures of these
expectations to be met will weaken the representation.
This is what ensures that there is a correspondence between outcomes represented motorically in
observing actions and the goals of those actions.
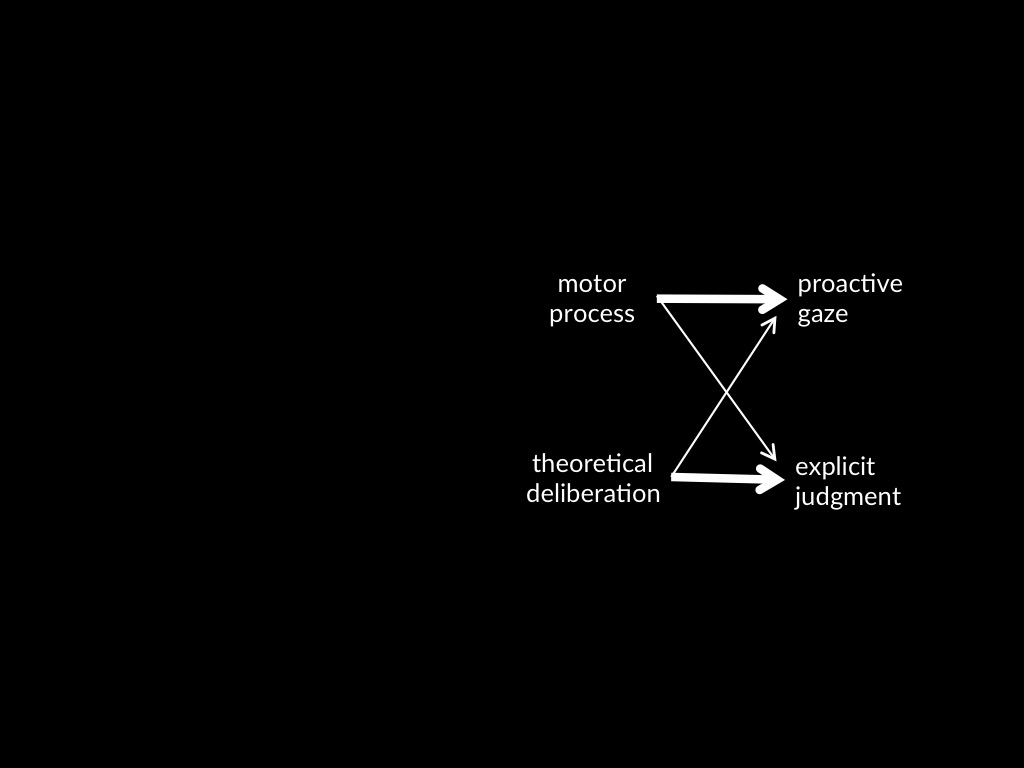
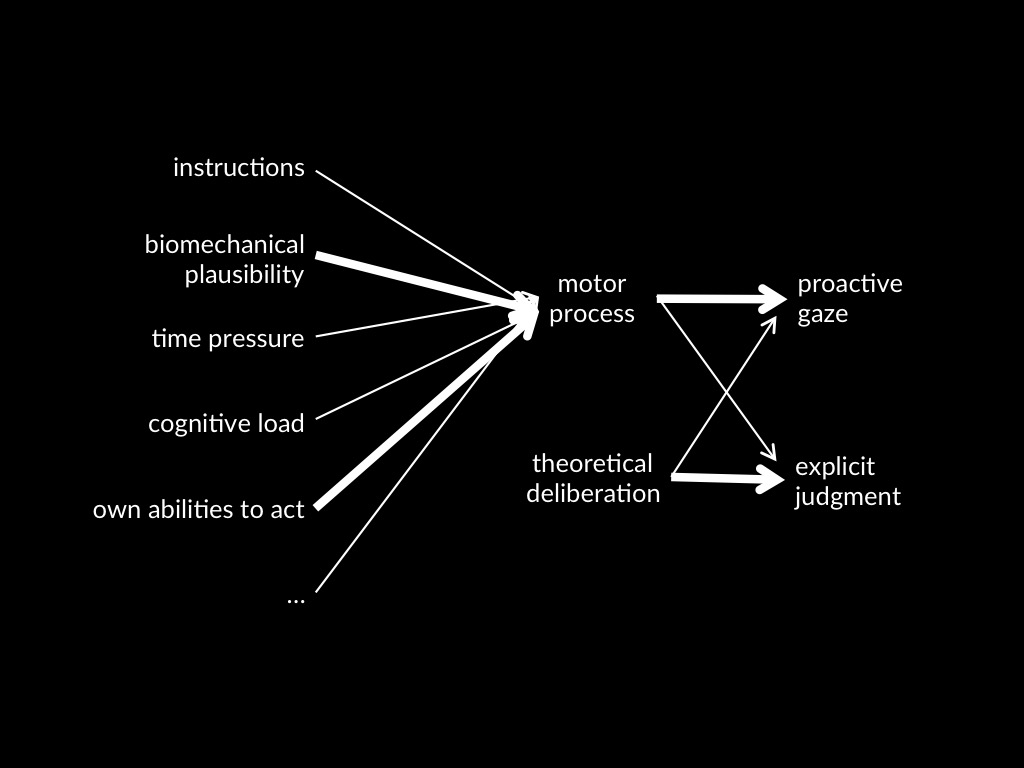
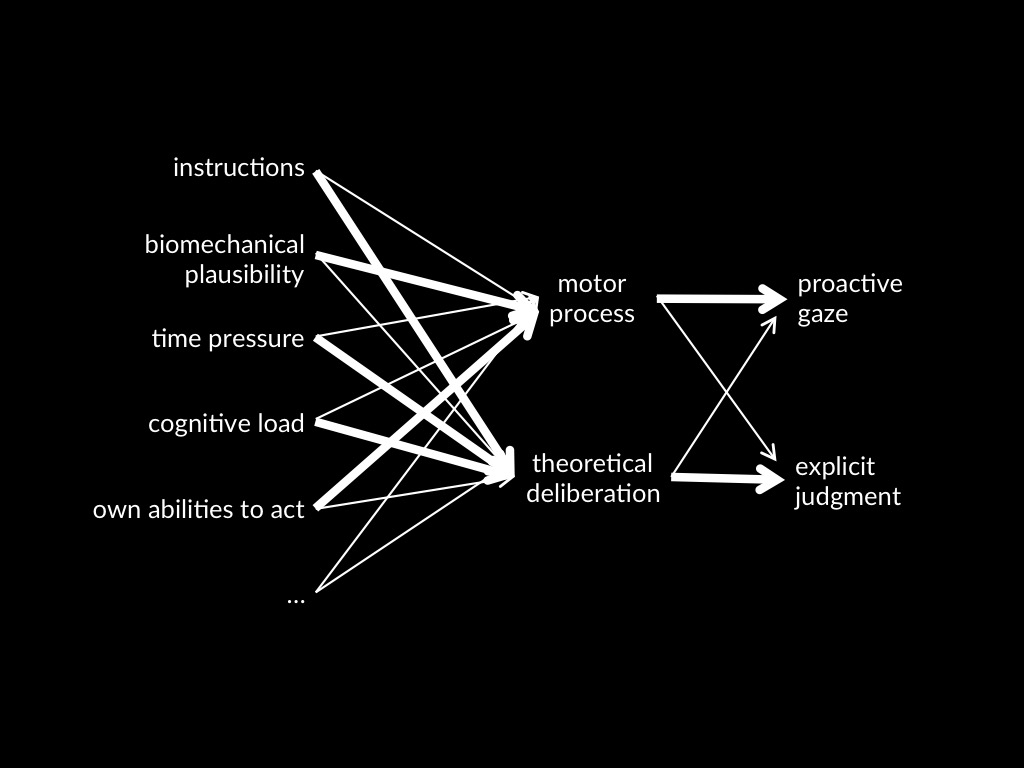
‘proactive gaze’ and ‘explicit judgement’ are variables whose values represent
whether there is a proactive gaze or explicit judgement, and what is it to or about.
Likewise, ‘motor process’ is a variable whose values represent ...
The lines depict how the variables are causally related. I’ve used thick and thin
lines informally, to indicate weaker and stronger influences.
The dual-process theory of goal-tracking makes perfect sense of development.
It says that what we observe in six- and nine-month-olds is motor-based goal-tracking.
Presumably the more flexible, reasoning-based goal-tracking processes emerge some time
later in development.