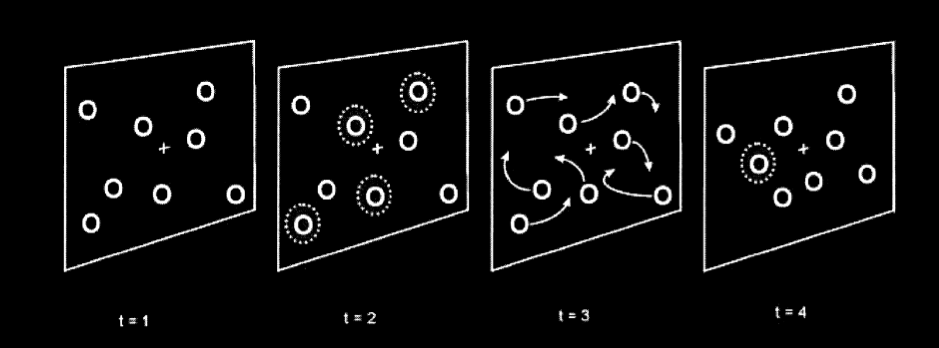
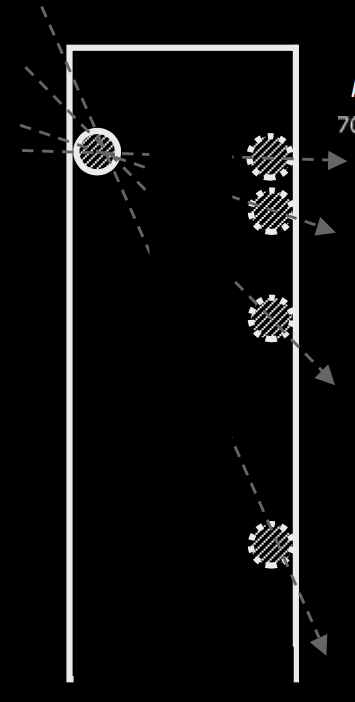
Suppose you are shown a display involving eight stationary circles, like
this one.
Pylyshyn 2001, figure 6
There is a behavioural marker of object-indexes called the object-specific preview benefit.
Suppose that you are shown an array of two objects, as depicted here.
At the start a letter appears briefly on each object.
(It is not important that letters are used; in theory, any readily
distinguishable features should work.)
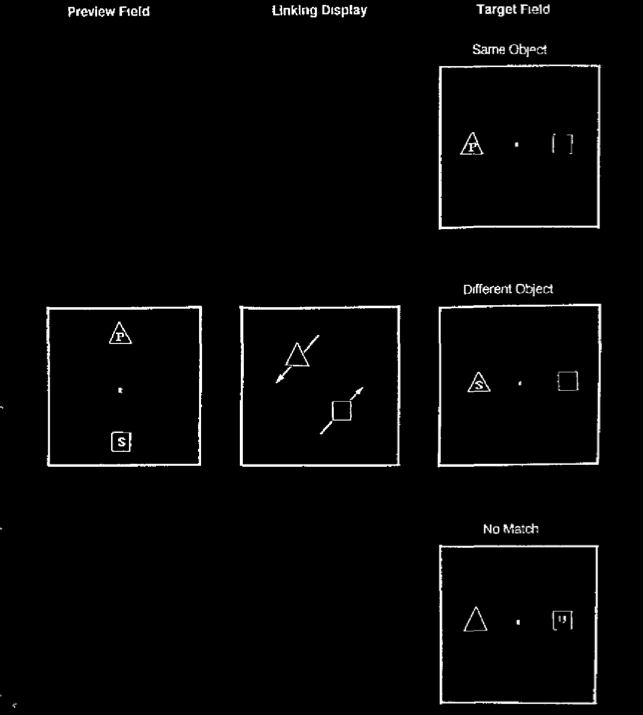
Kahneman et al 1992, figure 3
The \emph{object-specific preview benefit}: ‘observers can identify target
letters that matched the preview letter from the same object faster than
they can identify target letters that matched the preview letter from the
other object’ \citep[p.\ 2]{Krushke:1996ge}.
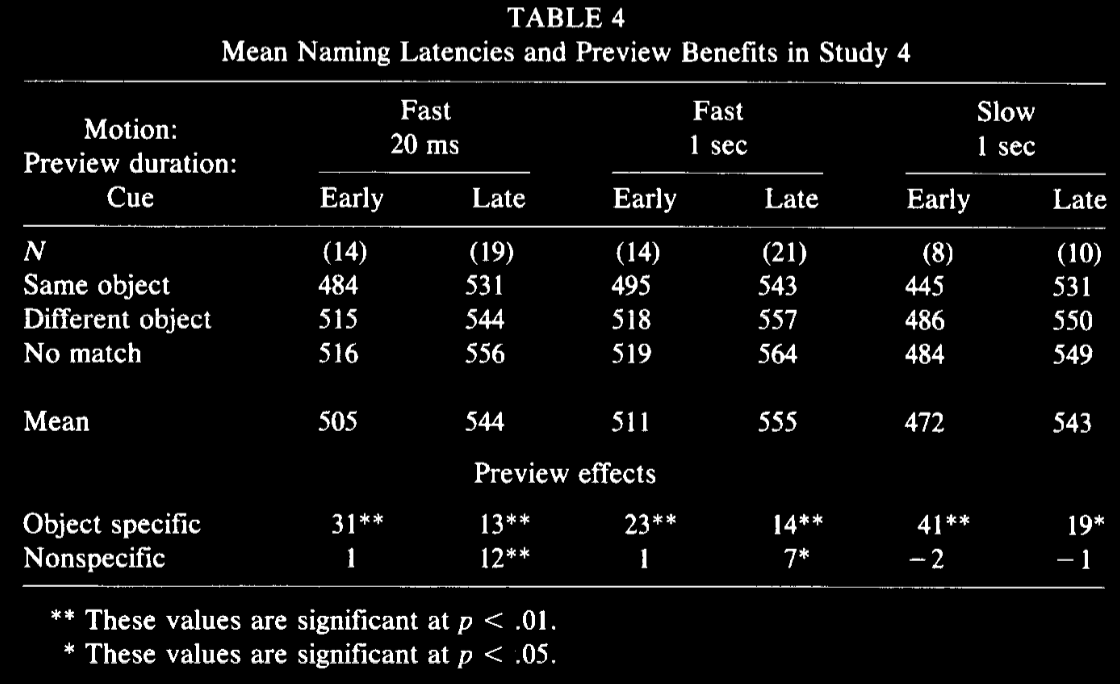
Kahneman et al 1992, table 4
Assignments of object indexes can conflict with beliefs and knowledge states.
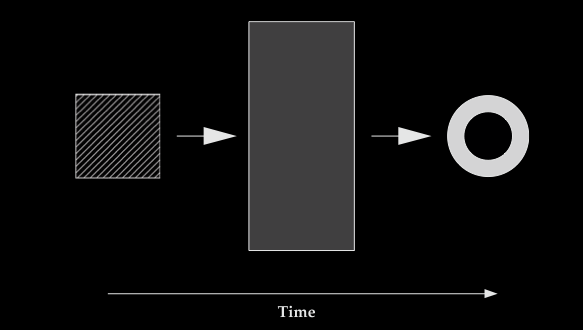
Scholl 2007, figure 4
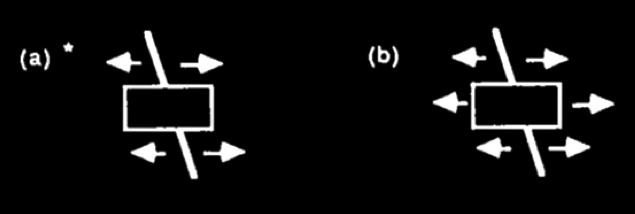
In this scenario,
a patterned square disappears behind the barrier; later a plain black ring emerges.
If you consider speed and direction only, these movements are consistent with there being just one object.
But given the distinct shapes and textures of these things, it seems all but certain that there must be two objects.
Yet in many cases these two objects will be assigned the same object index \citep{flombaum:2006_temporal,mitroff:2007_space}.
So one signature limit of systems of object indexes is that information about speed and distance can override information about shape and texture.
This system of object indexes
does not involve belief or knowledge
and may assign indexes to objects in ways that are inconsistent with
a subject’s beliefs about the identities of objects
\citep[e.g.][]{Mitroff:2004pc, mitroff:2007_space}

[ducks picture]
Is one object index assigned or two?
Assigning object indexes requires segmentation.
Spelke, 1990 figure 2a
Consider a stick moving behind a screen, so that the middle part of it is occluded.
Assigning one index even though there is no information about continuity of surfaces
may depend on analysis of motion.
principle of continuity---
an object traces exactly one connected path over space and time
Franconeri et at, 2012 figure 2a (part)
[Here we’re interested in the issue rather than the details: the point is just that
continuity of motion is important for assigning and maintaining object indexes.]
Suppose object indexes are being used in tracking four or more objects simultaneously and one of these objects—call it the \emph{first object}—disappears behind a barrier.
Later two objects appear from behind the barrier, one on the far side of the barrier (call this the \emph{far object}) and one close to the point where the object disappeared (call this the \emph{near object}).
If the system of object indexes relies on assumptions about speed and direction of movement, then the first object and the far object should be assigned the same object index.
But this is not what typically happens.
Instead it is likely that the first object and the near object are assigned the same object index.%
\footnote{
See \citet{franconeri:2012_simple}. Note that this corrects an earlier argument for a contrary view \citep{scholl:1999_tracking}.
}
If this were what always happened, then we could not fully explain how infants represent objects as persisting by appeal to object indexes because, at least in some cases, infants do use assumptions about speed and direction in interpolating the locations of briefly unperceived objects.
There would be a discrepancy between the Principles of Object Perception which characterise how infants represent objects as persisting and the principles that describe how object indexes work.
But this is not the whole story about object indexes.
It turns out that object indexes behave differently when just one object is being tracked and the object-specific preview benefit is used to detect them.
In this case it seems that assumptions about continuity and constancy in speed and direction do play a role in determining whether an object at $t_1$ and an object at $t_2$ are assigned the same object indexes \citep{flombaum:2006_temporal,mitroff:2007_space}.
In the terms introduced in the previous paragraph, in this case where just one object is being tracked, the first object and the far object are assigned the same object index.
This suggests that the principles which govern object indexes may match the principles which characterise how infants represent objects as persisting.